-
LZ4 v1.9.4(lz4-1.9.4.zip)をダウンロードしてファイルを解凍する。(C:\lz4-1.9.4)
https://github.com/lz4/lz4/releases/tag/v1.9.4 -
CMakeLists.txtをvcpkgからダウンロードする。(C:\lz4-1.9.4\CMakeLists.txt)
Tsukasa Sugiura UnaNancyOwen
UnaNancyOwen
/ README.md
Last active
December 17, 2023 04:01
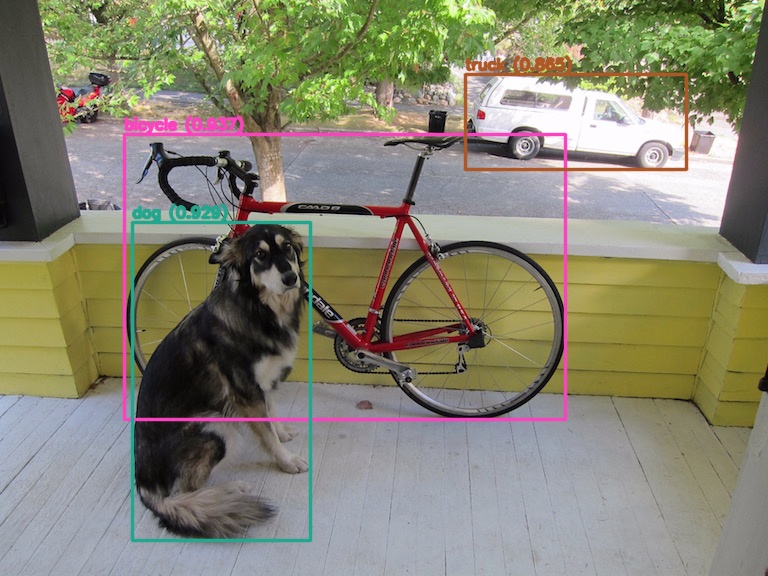
Object Detection using YOLOX inferred by OpenCV DNN module


UnaNancyOwen
/ interactive-select-rect-in-image-using-tensorflow-colab-utils-on-google-colab.ipynb
Created
May 1, 2023 09:15
Interactive Select Rect in Image using TensorFlow Colab Utils on Google Colab.ipynb
Sorry, something went wrong. Reload?
Sorry, we cannot display this file.
Sorry, this file is invalid so it cannot be displayed.
UnaNancyOwen
/ interactive-select-rect-and-point-in-image-using-matplotlib-on-google-colab.ipynb
Last active
August 25, 2023 06:35
interactive-select-rect-and-point-in-image-using-matplotlib-on-google-colab.ipynb
Sorry, something went wrong. Reload?
Sorry, we cannot display this file.
Sorry, this file is invalid so it cannot be displayed.
UnaNancyOwen
/ FindOrbbecSDK.cmake
Created
April 9, 2023 07:29
CMake Find Package Module for Orbbec SDK 1.x
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| #.rst: | |
| # FindOrbbecSDK | |
| # --------- | |
| # | |
| # Find Orbbec SDK include dirs, and libraries. | |
| # | |
| # IMPORTED Targets | |
| # ^^^^^^^^^^^^^^^^ | |
| # | |
| # This module defines the :prop_tgt:`IMPORTED` targets: |
UnaNancyOwen
/ imagenet_classes.txt
Created
May 12, 2022 06:34
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| tench | |
| goldfish | |
| great white shark | |
| tiger shark | |
| hammerhead | |
| electric ray | |
| stingray | |
| cock | |
| hen | |
| ostrich |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| __background__ | |
| person | |
| bicycle | |
| car | |
| motorcycle | |
| airplane | |
| bus | |
| train | |
| truck | |
| boat |
UnaNancyOwen
/ CMakeLists.txt
Last active
August 10, 2022 02:17
Start Project for Point Cloud Library
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| cmake_minimum_required( VERSION 3.6 ) | |
| # Language | |
| enable_language( CXX ) | |
| # Compiler Settings | |
| set( CMAKE_CXX_STANDARD 17 ) | |
| set( CMAKE_CXX_STANDARD_REQUIRED ON ) | |
| set( CMAKE_CXX_EXTENSIONS OFF ) |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| import os | |
| import numpy as np | |
| import cv2 as cv | |
| def main(): | |
| # 画像を読み込む | |
| directory = os.path.dirname(__file__) | |
| image = cv.imread(os.path.join(directory, "image.jpg")) | |
| if image is None: | |
| exit() |
UnaNancyOwen
/ README.md
Created
October 13, 2021 09:43
OpenCV DNN Object Detection Model (Scaled YOLOv4) Sample

NewerOlder