First posted in August 2021. This is basically a snapshot of my thinking about pansharpening at that time; I’m not making any substantial updates. Last typo and clarity fixes in February 2023.
This is a collection of notes on how I’ve been approaching convolutional neural networks for pansharpening. It’s an edited version of an e-mail to a friend who had asked about this tweet, so it’s informal and somewhat silly; it’s not as polished as, say, a blog post would be. It’s basically the advice I would give to an image processing hobbyist before they started working on pansharpening.
If you want a more serious introduction, start with the literature review in Learning deep multiresolution representations for pansharpening. Most of the academic work I would recommend is mentioned there.
If you spot an error in the physics or math here, or a typo, please mention it. If you see a simplification or minor abuse of terminology, it’s on purpose. For textbook rigor, try a textbook. These are personal notes on approaches to a problem.
- Groundwork
- Resolutions. Thinking about spectral resolution.
- R. Measuring spectral resolution.
- Journey to the planet of redundant reflectance spectra: the tasseled cap transform and chroma subsampling. Thinking about the mean of visible radiance and its residuals leads to a useful connection between reflectance statistics, pan bands, and chroma subsampling.
- Pan bands. But pan bands are not perceptually ideal brightness bands, partly because of haze.
- Pansharpening
- Incrementally better definitions of some terms. Vocab for color spaces.
- Classical approaches and why they don’t work so good, or at least not as good as we want. Most classical pansharpening techniques fall in a few clusters. Please don’t use PCA-based pansharpening.
- Our friend the convolutional neural network. Why it makes sense to apply CNNs here. The superresolution in pansharpening is diagonal across the spatial and spectral axes.
- Pansharpening (huh!) what is it good for? Pansharpening should be done end-to-end and used only by people, not as input for further models or quantitative analysis. (The angriest section.)
- He’s also mad about losses. Loss functions operating on badly nonuniform color spaces (like sRGB) are not modeling perceptual difference well. Chroma texture is central to pansharpening, so try to put a loss directly on it.
- Generative adversarial networks, scale, and Wald’s protocol. Notes on scale-dependence: unconditional gans might be a way around?
- Color? Didn’t we already talk about that? Use real color matching functions – don’t just trust the names of the red, green, and blue bands.
- Shuffles. Pixel shuffling’s 2ⁿ:1 reshaping is a handy match for the standard pan:mul spatial ratio.
- Oh no, data trouble, how unexpected
- Data is never totally abstracted from its source [audience gasps]. Band misalignment is scale-dependent, so watch out.
- There is no good pansharpening dataset. The profit motive to release some free raw material seems to be there, but we do not observe this in the wild.
- In conclusion, pansharpening must be destroyed
- Welp
Why pansharpening? Because if you follow the news and read widely, you probably see a couple pansharpened images a day, and most of them are noticeably iffy if you know what to look for. Because it’s ill-posed and that makes it fun. Because it’s closely connected to Bayer demosaicking, SISR, lossy compression, and a bunch of other interesting topics. Because it’s a great example of a heavily technical problem with more or less purely subjective outputs (see 2.4, below).
When we talk about the resolution of an image in everyday English, we mean its dimensions in units of pixels: say, 4K, 1024×768, or 100 megapixels. In a more pedantic conversation, for example among astronomers, it’s more likely to mean angular resolution, or the fraction of the sphere that each pixel subtends, in units of angle: say, 1/100°, 1 arc second, or 20 mrad. In satellite imagery, resolution usually means a third thing: the ground sample distance (GSD), or the size of Earth’s surface area covered by each pixel, in units of length on the ground: say, 1 km, 30 m, or 30 cm. We will call this spatial resolution.
But note spatial. There are other resolutions. An image might resolve more or fewer light levels, measurable in bit depth: radiometric resolution. It might resolve change over time, measurable in images per year or day: temporal resolution. And it might use multiple bands to resolve different parts of the spectrum into separate colors or channels: spectral resolution.
A sensor’s different resolutions compete for design, construction, and operational resources. You don’t see any one satellite with the very best in spatial, radiometric, temporal, and spectral resolution; they tend to specialize in one or two. Every sensor is a compromise between resolutions.
Here we will ignore all but spatial and spectral resolution.
We can measure spectral resolution with the dimensionless quantity R = λ / Δλ, the ratio between a wavelength and the distance to the next distinguishable one. In other words, a sensor has a spectral resolution of one part in R. For the human visual system, R is very roughly 100: depending on conditions, the average observer can just about distinguish between lights at 500 and 505 nm (or 594 and 600 Thz, if they find that easier). High-end echelle spectrometers on big telescopes have an R of about 10⁵, so they can measure the tiny redshift induced in stars by exoplanets too small to image directly.
For an example outside electromagnetism, people with relative pitch have an auditory R of about 17 or better, since the semitone ratio in twelve-tone equal temperament is the 12th root of 2 = 1.0594…, and 1/(1.0594-1) = 16.8… (unless my music theory is wrong, which would not surprise me).
1.3 Journey to the planet of redundant reflectance spectra: the tasseled cap transform and chroma subsampling
An intuitive interpretation of principal component analysis (PCA) is that we’re taking multidimensional data and defining new dimensions for it that align better with its distribution. In other words, the shape of the data itself stays the same, but we get a new set of coordinates that follow correlations within it. The new coordinates, or components, are ordered: principal component 1 is a (specific kind of) best fit line through the data, PC 2 is the best fit after PC 1 is factored out, and so on. PCA is a blunt instrument, but it is good at turning up patterns.
In 1976, Kauth and Thomas put cropland reflectance timeseries through PCA. To our 2021 brains, numbed by the supernormal stimuli of multi-petabyte global datasets, their inputs were so small they practically round down to empty, but they were enough to find correlations that remain interesting. The orthonormal basis that PCA derived for their handful of image chips of Midwestern farms had axes that they named:
-
Brightness. The vector for this component was positive in every band, and amounted to a rough average of all of them. This axis alone collected most of the variance in the data.
-
Green stuff. This was negative for visible wavelengths and strongly positive for NIR, much like NDVI, a standard vegetation index. Loosely, it’s a chlorophyll v. everything else axis.
-
Yellow stuff (or, with opposite sign, wet stuff). This component tends to sort pixels on an axis from wet (open water, moist soil) on one end to ripe (senescent plants, dry soil) on the other.
Projected into this 3D space, the annual cycle of crops followed a clear pattern. From that paper (p. 42):
We say that the crop starts growing on the plane of soils. As it grows it progresses outward, roughly normal to the plane of soils, on a curving trajectory towards the region of green stuff. Next the trajectories fold over and converge on the region of yellow stuff. Finally the crop progresses back to the soil from whence it came (dust from dust?) by any of several routes, depending on the crop and the harvesting practices.
Initially we spoke of a flattened triangle, now we are likening the data structure to a tasselled cap. To fit both of these images the yellow point must be quite close to the side of the cap, and indeed that is true. For wheat the yellow is also accompanied by shadowing so that the yellow point is found near the dark end of the plane of soils.
The “front” of the cap looks down toward the origin of all data otherwise called THE ORIGIN. On the front of the cap is the badge of trees.
This transformation of reflectance data into dimensions of brightness, greenness, and yellowness is therefore called the tasseled cap transform. TC has been taken very seriously: people still use it and calculate its coefficients for new satellites.
The pattern of the tasseled cap shows up in a wide range of terrestrial biomes seen by a wide range of sensors. If you put a Sentinel-2 timeseries of Malawi into PCA, you’ll get results that (usually, in the first few components, with reasonable caveats) look a lot like Landsat 2 over Illinois or SPOT 6 over Hokkaido. This implies that TC indexes some fact about Earth’s land surface that’s larger than how Kauth and Thomas first used it – that TC has something pretty general to tell us.
TC will obliquely inform some stuff we’ll get into later, but the main reason I bring it up is because of the brightness component. It’s interesting that it’s a rough average of all the bands. Let’s walk around this fact and squint at it from different angles. It means:
-
If a real-world surface reflects n% of light at any given visible wavelength, n% is a good estimate of its reflectance at any other visible wavelength.
-
Vivid, saturated colors at landscape scale are rare in nature. The main exceptions are green veg/reddish soil and blue water/yellow veg: principal components 2 and 3. (The things that come to mind when we think of bright colors – stop signs, sapphires, poison dart frogs – are salient because of their rarity at landscape scale. What fraction of our planet’s surface is a rich violet, for instance?)
-
From an information theory or compression perspective, if you want a framework to transmit an approximation of a pixel of Earth, a good approach is to start with its mean value in all bands. Then you might proceed to the degree to which it resembles vegetation, and the degree to which it resembles water, after which the residual will typically be small.
-
By the central limit theorem and/or the nature of color saturation, the colors of everyday life will, as you downsample them (or, equivalently, move your sensor further away), tend to become less vivid.
All different ways of getting at the same statistical fact about reflectance from Earth’s land surface. If I had to theorize, I would say that molecules and structures that strongly reflect only a narrow part of the spectrum are thermodynamically unlikely and thus developmentally expensive, and are therefore uncommon except at the single organism scale and where they confer strong benefit, e.g., aposematism. (Chlorophyll … well, I feel weird about chlorophyll right now because I feel like I’m missing a key idea somewhere in this.)
The human visual system is adapted to this fact about the visible world. Our experience of hue is powerful and complex, but in terms of what’s quantifiably sensed, most information that makes it out of the eyes and into the brain is about luma (brightness) and not chroma (hue and saturation). (These are loosely the “video” senses of luma and chroma, which have different definitions in different jargons.)
In particular, our ability to see fine detail in chroma alone is much weaker than a reasonable layperson might guess. For example, lossy image and video compression (which models the human visual system as it decides which information to distort or omit) almost universally represents color information with less spatial detail than brightness information gets. People will reliably rate a video, say, with sharp luma and blurry chroma as sharper than one with blurry luma and sharp chroma. Familiar lossy visual codecs, from JPEG to the MPEGs, deliver what amount to sharp monochrome images mixed with blurry or blocky hue and saturation images. This is chroma subsampling.
Most optical satellites also subsample chroma. WorldView-3, for example, collects a panchromatic band at 0.5 m resolution and 8 multispectral bands at 2 m resolution. (These numbers are rounded up, and WV3 is not the only interesting satellite, but we’ll stick with them for simplicity.) The reasons are closely analogous.
First, because there’s a tradeoff between spatial and spectral resolution (see 1.1, above). I’m looking at Table 1 in the radiometry documentation for WV3. Now I’m firing up python and typing:
def R(center_nm, ebw_µm):
return center_nm / (1e3 * ebw_µm)And calculating R for each band up to NIR2 and getting:
| Band | R |
|---|---|
| Panchromatic | 2.24 |
| Coastal | 10.6 |
| Blue | 8.92 |
| Green | 8.03 |
| Yellow | 15.8 |
| Red | 11.2 |
| Red edge | 18.7 |
| NIR1 | 8.21 |
| NIR2 | 10.3 |
(N.b., this is not really the pukka definition of R from 1.2. The ideal spectrometer has square response curves of width λ/R, forming an exact cover of the spectrum. WV3 is just not designed that way, as Figure 1 in that documentation shows, so we’re abusing terminology (I warned you) and using λ / effective bandwidth: a loose R that only has meaning for a single band. This version of R is useful here and doesn’t lead to absurdities, so we’ll note the sloppiness and run with it.)
The mean for the multispectral bands (which we might call the sloppy R of the multispectral sensor as a whole) is 11.5. The spectral resolution of the multispectral data, then, is a little over 5 times higher than the spectral resolution of the panchromatic data. Meanwhile, the spatial resolution of the pan band is 16 times higher than that of the mul bands. 2 m ÷ 50 cm looks like 4, but we’re thinking about area and thus squares: it’s 4×4 = 16 pan pixels that fit inside (spatially resolve within) one mul pixel. Conversely, it’s a set of 8 mul bands that approximately fit inside (spectrally resolve within) the pan band. (That’s a load-bearing “approximately” and we’ll have to come back to it.)
Imagine a hectare of land covered by 40,000 pan pixels with R = 2.24, and by 2,500 mul pixels with R = 11.5. The pan band has high spatial resolution but low spectral resolution. The mul bands have high spectral resolution but low spatial resolution.
If it’s the Cold War and you’re in a lab designing an orbital optical imaging surveillance instrument, you probably want to make something that’s as sharp as possible, color be damned. In the literature, a point is often made that multispectral and particularly infrared imaging can spot camouflage, because for example a T-62 painted in 4BO green will generally stand out against foliage in the NIR band even though it’s designed not to in the visible band. But then someone makes a green that reflects NIR or switches to 6K brown, right? So from out here in the unclassified world, it seems that multispectral is useful, sometimes vital, but it’s safe to guess that spatial resolution has always been the workhorse of space-based imagery.
(Also, since 1972, Landsat has been pumping out unclassified NIIRS 1 multispectral. I eBayed a faintly mildewy copy of Investigating Kola: A Study of Military Bases Using Satellite Photography, which is really impressive osint using Landsat alone. And it’s suggestive that the most famous leaked orbital surveillance image was (a) mind-bogglingly sharp for the time, and (b) monochrome; and that, 35 years later, another major leak could be described the same way. These circumstantial lines of evidence support the idea that optical spy satellites go for spatial resolution above all.)
So this is why we have pan bands in satellite imaging. A curiosity is that almost all of them are biased toward the red end of the visible spectrum; often they have no blue sensitivity at all but quite a bit of NIR. It’s mainly because of Rayleigh scattering, which is proportional to λ⁻⁴: most light scattered in clear air is blue. We see this when we look up at a blue sky covering what would otherwise be a mostly black starfield. Satellites see the sky from the other side, but Earth’s surface shines through more clearly since it’s brighter overall than the starfield. The scale height of Earth’s atmosphere is about 8.5 km, so when you look at even reasonably close things in the landscape (e.g., Tamalpais from the Oakland hills, or Calais from Dover, or Rottnest Island from a tall building in Perth’s CBD, all ~30 km), you’re looking through much more sky than a satellite generally does.
Air in bulk, then, means blue haze. We tend to think of haze as adding blue light, and in many situations it does, but better to say it moves blue light around. Blue photons are diverted into the light path from a distant red object to the eye, but they’re also deflected from the light path between a distant blue object and the eye. The blue sky and other haze are the photons that, by their absence from the direct path, make the sun slightly yellow instead of flat white. (Any color scientist reading this just had all their hair stand up like they touched a Van de Graaff generator, but we’re simplifying here.)
A hazy image’s blue channel isn’t just bright: it’s low-contrast – and especially from space, since that light’s been through at least two nominal atmospheres. Seeing is better toward the infrared. (Kodak made “extended red” aerial film that terrestrial photographers still use for its contrasty landscapes and dark skies. These films are the ancestors of current satellite pan bands.) Also – and this might be good, bad, or neutral – live vegetation shines, since it reflects NIR extremely well just outside the visible range. Look at the trees by that shipyard, for example.
On this footing, we can usefully say that to pansharpen is to combine panchromatic and multispectral data into an image that approaches the spatial resolution of the pan band and the spectral resolution of the mul bands.
We used chroma subsampling as an analogy for the pan/mul split in pansharpenable satellite sensors. Let’s dig further into that.
Human color perception is approximately 3D, meaning you can pretty well define the appearance of any color swatch with a 3-tuple of numbers. As with map projections, there are many useful projections of colors, but none of them meets every reasonable need. For people who work with computers, the most familiar is sRGB. (The rest of this paragraph contains some especially big simplifications that I’ll gloss over with weasel words like “in principle” and “conceptually”; please play along to save time.) Conceptually, sRGB takes radiance, i.e. the continuous power spectrum of EM in the visible range, and bins it into rough thirds called red, green, and blue. To measure a color, you count photons in these buckets. To create a color, you send photons out of primary lights, as with stage lights or, presumably, the screen you’re reading this on. In principle, there’s a clear physical interpretation of what sRGB approximates: energy per third of the visible spectrum.
But this cuts across the grain of human color perception. When we look at how visual artists, for example, like to organize colors, we find color wheels. These are generally gray in the center, with fully saturated colors along the rim. In a third dimension, we imagine that the circle is a slice of a cylinder or a sphere, with lighter colors toward the top and darker ones toward the bottom. Making black-to-white its own axis, instead of running diagonally along the R, G, and B axes, reflects how intuition and experiments suggest we organize colors in the mind.
This kind of projection is called an opponent color space, and it lets us cleanly map, for example, blue and yellow as perceptual opposites on a single axis. (It’s a representation of opponent process theory, which models how the neural nets just beside, behind, and above our noses represent the color feature space.) With some mild abuse of jargon, we can call the lightness dimension of an opponent space the luma axis. The other two axes together, representing the color qualities orthogonal to lightness (e.g., redness, saturation, etc.) are the chroma axes. The planes of chroma can be neatly addressed in polar coordinates, like a color wheel, and smoothly represent a curious feature of the human visual system: purple. We feel that the deepest reds are in some way continuous with the deepest blues. This is not the case in, for example, aural perception – we do not think that the highest perceivable sounds are continuous with the lowest perceivable sounds. But in color perception, we have the line of purples, and chroma in an opponent color space lets us work with purple in a way that feels about right.
Additive and opponent spaces are radically different in intent, but in practice they look reasonably similar because they represent the same thing, to a Mollweide v. Robinson level. If you imagine the sRGB color space as the unit cube, with each axis running from none to all red, green, and blue, you can further imagine tipping that cube 45° so that its white vertex is on top and its black vertex is on the bottom. Please be careful of its sharp corners. That’s a simple but valid opponent color space. There are more complex ones, for example YCbCr and YCoCg, that probably encoded some of the things in your field of view right now.
Why wouldn’t he illustrate this?, you wonder. This is all about visual and spatial ideas, you point out. Well, look, if I started it would be a several-month project.
A baseline approach to pansharpening is to construct a low-res RGB image from your mul bands, upsample it, and put its chroma in the output chroma channels (glossing over color space conversion), discarding its luma component. Meanwhile, you put the pan band in the output luma channel. You now have what amounts to a chroma subsampled image. Someone who’s learned to notice it will be able to see that the chroma is blurry. Especially around strong color contrasts (e.g., a bright red building against a green lawn) there’s a sort of smeared, wet-on-wet watercolor effect where we see the upsampling artifacts of big chroma pixels being interpolated.
Furthermore, there will be spectral distortion because the pan band does not correspond perfectly to visible luma – it’s got too little blue and too much NIR. This means that, for example, water will be too dark and leaves will be too bright. You can see this clearly in cheaply pansharpened images: the trees have a drained, grayish pallor, as if they’ve just been told that the oysters were bad. That effect can be improved with algorithmic epicycles, but eventually you’re just reinventing some other more advanced technique. This basic approach is called IHS pansharpening (after an alternate name for opponent color spaces). I would only use it in an emergency.
People also pansharpen with PCA. They take their low-res mul image, apply PCA, upsample it, replace the first component (which, recall, will pretty much always be a rough average of the mul bands, i.e., will look about like a pan band) with the pan band, and rotate back from the PCA space to RGB. This is pretty clever! I mean that in a derogatory sense. It’s very bad. It uses the statistical fact that PC 1 tends to look like a pan band, but to what advantage? We’re trying to look like reality, not like the pan band. IHS pansharpening is lazy but basically works, ish, and is predictable. PCA pansharpening is less lazy than IHS in the sense that it takes more computation, but there’s no theoretical or practical reason to expect the results to be better, plus it’s adaptive in a useless way. In a very green scene, for example, PC 1 will tend to collect more green, which will in turn subtract green from the scene when the pan band is substituted: a data dependence that reflects no underlying physical, geostatistical, or esthetic truth. Mostly it just benchmarks the matrix math library. Pfui.
The Brovey method works like this: We realize that we can’t get around the fact that the pan band doesn’t align perfectly with real-world luma for the human eye. But we have another resource that should align better: the mul bands, or at least the ones we choose from within the range of human vision, perhaps appropriately weighted. Although these are not spatially precise, they are generally accurate as to what should look bright and what shouldn’t. So we can look at a mul pixel’s footprint and constrain the 16 pan pixels that sit inside it to have the same mean luma as the luma of the mul pixels, calculated by a color matching function (or see 2.7, below) that maps a radiance to a perception. (In practice we do it in a semi-backwards way to avoid edge effects, but this is the core concept.) This should leave us with most of the fine gradients, i.e. detail at the ~2 pixel scale, of the pan band – while constraining it at the slightly larger pixel neighborhood scale to conform to the overall brightness contours of the mul bands, which we trust more at those scales.
Brovey is analogous to sensor fusion in other domains, like positional data. Say you have a GPS fix stream that gives you positions that are accurate but not precise: it knows where you are +/- a few meters every second, but within that range there’s random noise. And you have a 3D accelerometer, which is precise but not accurate: it can sense motions on the millisecond and millimeter scale, but it doesn’t know its own starting point, and if you were to integrate its acceleration readings over more than a few minutes, the noise and biases would compound into infinities. So what you do is – and this is easiest to imagine with one axis at a time – you take your GPS timeseries and smooth it by making a (let’s say) 10 second moving average. Then you take your accelerometer integration and smooth it by the same amount. Then you subtract the smoothed version of the accelerometer data out of it, so you’re left with only the short-term components of motion (a.k.a. the high frequencies), averaging 0. Then you add that short-term component onto the smoothed GPS timeseries.
Now, ideally, you have a signal that is both accurate (anchored by the GPS at coarse scales) and precise (sensitive to the accel’s record of small motions at fine scales) without the short-term noise of the GPS or the long-term noise of the accel. In practice, you might prefer something more sophisticated than a moving average to decompose your signals into a high and low pass, for example, but the core idea will work. The mul bands correspond to the GPS: they are spatially coarse but provide a better estimate of what should actually look bright. The pan band is like the accel: better at picking up detail, but unreliable about absolute brightness. (There’s a converse to this in the spectral domain, although the symmetry is not perfect.)
This kind of fusion is common to Brovey, the Zhang method, indusion, pyramidal methods, and so on; at its most abstract, it’s an umbrella covering most of the reasonable classical image processing approaches to pansharpening. As a basic version, in pseudocode:
def pansharpen(pan: image[1, w, h], rgb: image[3, w/4, h/4]) → image[3, w, h]:
rgb_coarse = upsample(rgb, 4) # the resampling could be, say, bicubic
pan_coarse = upsample(downsample(pan, 4), 4) # as a low-pass filter
pan_fine = pan - pan_coarse # only the spatially fine features, mean near 0
pansharpened = empty_like(rgb_coarse) # i.e., clone rgb_coarse
for band in (R, G, B):
pansharpened[band] = rgb_coarse[band] + pan_fine
return pansharpenedI like and use this family of methods. However, its artifacts are still noticeable. The trees overlapping the Tiber are a good example of one class of artifacts. What we’re seeing there is that the mul channels said “these regions look mostly the same – maybe there’s more texture in the trees, maybe they’re a purer green, but the difference is fairly minor on the scale of possible differences between image regions” while the pan band said “in the near infrared, the water is virtually black and the tree is virtually white, so there’s a very strong gradient here”. Since we trust the pan gradients at small spatial scales, it forces a gradient into the output. At larger spatial scales, the mul bands regain control, but a weird ring remains.
There are more complex classical pansharpening approaches, based on things like edge analysis. For example, if something in the pan band looks like it divides two areas that might have different chroma (because they have different brightness, or different texture), the algorithm looks for a potential difference in chroma in the mul bands and tries to create a sharp edge in the output chroma aligned with the one in the luma. In my certainly incomplete knowledge, these don’t tend to work that much better than Brovey/indusion/pyramid approaches, which as you will have guessed from my description I think are in the sweet spot of accuracy v. complexity among the classical methods. That said, I think there’s room for breakthroughs yet in the edge-and-similar domain.
The edge approach suggests we might deploy CNNs here. They’re good at recognizing edges and they’ve met some success in closely related tasks, like superresolution. We can think of pansharpening as the task of 4× spatial superresolution of the mul bands as guided by the pan band. (Or 8× spectral superresolution of the pan band as guided by the mul bands. Or you could reckon it as 5.13×, from the R ratio.)
I read a Medium post a few months ago talking about pansharpening to make inputs for feature detection ML models. This annoyed me. Then, once I was done being annoyed at reading a Medium post on ML, I went on to be annoyed by what it actually said.
Don’t train models to do anything on pansharpened imagery. Unless that’s all you have. Which I admit is virtually all the time. But if you can use the raw data, the stuff that you used as input to pansharpening in the first place, use that instead!
Look at it this way. Let’s say we have a pansharpening model P and a feature-extracting model F. We train P with some loss that makes it take raw sampled pixels and create Good Pictures in some sense: P: samples → images. Now we train F with a loss that makes it Know What Stuff Is in some sense: F: images → labels. Sure. But also imagine that we make an end-to-end model E that takes raw sampled pixels and is trained with the Know What Stuff Is loss: E: samples → labels. What this rude Medium post wants us to believe is that, in terms of Knowing What Stuff Is,
F(P(pixels)) > E(pixels)
Bullshit. This is so wrong in theory that if it’s right in practice, the practice is wrong. If you see it, what happened is you made a bad model. You trained it for a negative number of epochs or something. If an end-to-end model is no better (at a given total parameter count, etc.) than two models in succession, one of which has a loss unrelated to the output [glances at camera with raised eyebrows], you broke it! Please do not write a Medium post about it!
More calmly, look. There’s fundamentally more information in the raw data. For example, the NIR bands: not being visible, by definition they should not appear in pansharpened output, but they contain information about surface materials that could distinguish a green sports tarmac from a grass field, a blue tarp from a swimming pool, pale soil from ripe wheat, and so on. Outside the most contrived hypotheticals and microscopic corner cases, hiding that information from the labeling network is overwhelmingly unlikely to improve labeling. Or, to turn it around, if (against all odds) pansharpening before feature extraction is truly optimal, well then, a good end-to-end model will learn to pansharpen as an internal bottleneck anyway.
Fine. Let’s strike out for more interesting waters. Consider the converse – what if feature extraction before pansharpening is useful? This is, to my mind, a good way of looking at what a CNN can bring to pansharpening. Imagine, as a starting point, that we hand-wrote an algorithm with a labeling module before the sensor fusion module. For instance, it might have an explicit water detector and an explicit tree detector, and the fusion module would look up the (hand-coded or statistically derived) fact that where those two labels adjoin, it should give low weight to pan gradients. This is, I think, a reasonably sensible approach. A problem would be managing the combinatorial explosion of label pairs and their exceptions: if we say “where two things of similar mul color touch, ignore pan gradients”, we might, for example, erase subpixel features like chalk lines on sports fields, railroad tracks, or the texture in rows of bright flowers.
This kind of fuzzy ruleset that we wouldn’t want to case out by hand seems to be the kind of thing that deeper image processing CNNs are good at. They can plausibly learn and co-generalize the plane-tree-against-Tiber rule and the rows-of-flowers rule in a way that is assuredly not perfect – pansharpening is an ill-posed problem and any perfect solution is a fraud – but good enough to use for the actual goal of pansharpening, which is for people to look at. Not to make input to further models, because that’s mathematically illiterate. Just for people to look at. That’s what pansharpening is for.
Pansharpening is only for people to look at.
We could, but won’t, go on a sidebar here about the famous Babbage quote:
On two occasions I have been asked, — “Pray, Mr. Babbage, if you put into the machine wrong figures, will the right answers come out?” In one case a member of the Upper, and in the other a member of the Lower, House put this question. I am not able rightly to apprehend the kind of confusion of ideas that could provoke such a question.
The easy wryness suggests that Babbage invented or exaggerated the incidents, but the misconception is real enough. The opaque mechanism of new technology, at least partly by virtue of its newness, always allows for some form of this confusion of ideas. And grifters will always use it to deceive and exploit. ML is a very good example of this today. The arguments to defend things like openly evil facial recognition are only one step more sophisticated than “I didn’t hit him on the head, the tire iron did – put the tire iron on trial and let me go” and yet we seem intellectually unequipped to object. Talk amongst yourselves about capitalism, innovation, and legibility; I will continue into this note on pansharpening.
The idea of training a feature extractor that only takes pansharpened data when you have the raw data right there is a cousin to the parliamentarian confusion. Correctness does not move by osmosis. Pansharpening’s outputs never contain more real information than its inputs do, and, with overwhelming likelihood, less. To believe otherwise is cringe. Pansharpened data is not a primary source. At its best, and this is the goal, pansharpened imagery is a good estimate of the truth and is pleasing and useful to look at. And that’s it.
Pansharpening is only for people to look at.
One implication of the conclusion in 2.4, which, just to repeat, was:
Pansharpening is only for people to look at.
is that we should be using perceptual losses for pansharpening models. In the literature, quadratic or L2-style loss, on the general pattern of (y − ŷ)², was standard for superresolution for a long time, but someone noticed that linear, L1-style losses like |y − ŷ| work better, even in L2 terms. The common interpretation of this is that L2 leads to indecisive models – drawing a soft edge where there may or may not be a sharp edge, for example, instead of choosing to draw a sharp edge or not. I find this reasonable but perhaps a little incomplete. It feels like an argument for GANs being even better than L1. However, there’s a deeper problem: L1 of what? Your common or garden GPU-botherer acts as if you just kind of have three channels in an image, R, G, and B, and there you go. If one of the numbers is different, the amount different is how bad a problem it is!
Well, bad news: it turns out the human visual system is kind of complicated. A late friend of mine wrote an introduction to it that weighs more than a kilo and a half. At a very conservative estimate of 10 facts per gram, that’s about 16,000 facts that we’re overlooking when we use L1(sRGB). And just imagine how many facts per pixel that comes out to.
What’s better? Well, for starters, a perceptually uniform color space. RGB in any ordinary form simply does not have the presumed property that an equal amount of pixel value change (in n channels) is an equal amount of human-evaluated change. Constant steps in sRGB color space almost always yield perceptually non-constant results. For example, in the first illustration here, all the swatch borders are equally sharp according to L1(sRGB). So we should use a color space defined around a perceptual metric.
Such a thing can only be approximated. One reason is that the 3D space of human color perception is non-Euclidean. For example, if you go around the rim of the color wheel, you pass through more than 2π times as many JNDs as you do going straight from the center to an edge. This is not an artifact of any one color space; it’s a fact about humans. We simply do not see color in a way that can be fixed in a space with a triangle inequality.
But you can come close! It’s easy to to approximately match an opponent space to pools of experimental data on perception, and possible to do a good job of it. So there are a few thoughtfully designed color spaces that are tolerable in practice. (You know, my practice but maybe not a perceptual psychologist’s practice.) HSLuv, presented in that last link, is one; Jzazbz is another. The one I think I like best today is Oklab. I have only minor reservations (well, since you asked: in that first image, perhaps the purple is not as saturated as the orange is?). All of these are head and shoulders better than sRGB for trying to determine whether a model got colors right.
Another issue is texture. For example, a region of an image being slightly too bright is not as big a problem as a region having a checkerboard artifact with the same total pixelwise ∆E (i.e., Euclidean distance in color space – implicitly a perceptually uniform-ish space, because otherwise it doesn’t matter). SSIM is a pretty good texture-sensitive method that’s catching on in the literature, but I’ve found it so slow that it uses more training wall-clock time than a simpler loss for similar results.
Something I haven’t seen in the literature but that made sense to me, so I’ve implemented (crudely, like an orangutan in a zoo trying to use a stick as a phone) is Frei-Chen edges. These are really elegant in a number of ways, not all of which I take advantage of. They’re also fast as torch convolutional layers. (I can go further into them and my doubts about some of my implementation choices but I would, obviously, hate to go on too long.)
Texture matters primarily for chroma. Leaving out various necessary but distracting details, we can divide the aim of our adventures in the Land of Pansharpening into two parts:
- Adjust local brightness in the pan band until it’s a perceptually correct luma field.
- Add local detail to the mul bands until they’re perceptually correct chroma fields.
The second is the more difficult in practice. Brovey, for example, does not complete step 2 (remember, it works on RGB channels, not the roughly orthogonal opponent channels). Basically, its output chroma is merely upsampled, without any new chroma detail qua chroma detail. And a reasonable test of more sophisticated pansharpening is: Was any texture added to the chroma? Does it have plausible gradients at a scale finer than it was sampled at? If you look at the chroma channels of your output, are they as sharp (in whatever reasonable sense) as the luma channel? I don’t think many results convincingly clear this bar yet. Mine don’t. My chroma channels, at best, have a few crisp metropoles and a lot of soggy peripheries. I think fully textured chroma is the goal that best describes the hardest part of pansharpening. And so I think it makes sense to train models with losses chosen as forcing functions for that particular metric. This is why I reach for explicitly textural loss functions even when L1 seems like it might do.
An elephant in the room here is gans. I’ve experimented with them but found them as unstable as I’d been warned. I would like to return to them one day when I’m more seasoned.
One of the things one might want to do with gans is to make an unconditional gan and throw some high-quality aerial or even snapshot images in the truth bucket. That is, train the pansharpener to make images that look a little like, say, landscape photos, at least at the texture level. Is this actually a good idea? Prob no, for a handful of individually moderately good reasons. But one of those moderately good reasons is interesting: maybe the model is supposed to be learning information that’s scale-dependent. A car, for example, is an object that has a fairly clear set of rules about edge sharpness and overall shape and vibe, and it should be recognizable partly because it falls in a narrow range of sizes. The whole point of using a CNN instead of trying to hand-write some interpolation rules is that it should be doing things like recognizing cars. If I use a training image taken from a rooftop that has cars 1k pixels long, will the pansharpener, when presented with real data where cars should be, you know, 10 pixels long, try to find and enhance 1k pixel-long car-like features? Or make whole trees look like individual leaves?
And this is interesting because the problem is actually already present. What I’ve been doing, and most people seem to, is making training pairs like this, in pseudocode:
rgb = multispectral_to_rgb(multispectral_pixels)
mul_small = downsample(multispectral_pixels, 4)
pan_small = downsample(panchromatic_pixels, 4)
x = combine(pan_small, mul_small)
ŷ = model(x)
training_loss = loss(rgb, ŷ)In words, we create a target image from the multispectral image, then downsample the inputs by a factor of 4. The downsampled pan is now the same spatial resolution as the target image, and the downsampled mul is 1/4 that size (or 1/16 as many pixels). If we’re working with real data that’s 50 cm pan and 2 m mul, this means that in training, the target image has a resolution of 2 m, the input pan has a resolution of 2 m, and the input mul has a resolution of 8 m. We’re feeding the model data that’s at a substantially different scale from how we want to use it! We’re already teaching it cars are tiny! This is bad! But it’s hard to get around. It’s pretty standard, and it gets called Wald’s protocol, although strictly speaking (for once) Wald’s protocol is a set of evaluation metrics that merely strongly suggest the method above.
So we don’t have a reliable x and y at the scale we actually care about. This bugs me constantly.
Another problem, while we’re here, is: if we’re downsampling, how should we be downsampling? The satellite sensor has some PSF and low-level resampling that we could theoretically try to reverse engineer by doing things like sampling off edges that we assume are straight and sharp, and I’ve seen people do that in papers (or at least refer to the fact that they did it somewhere offstage), but I don’t want to. I’m doing this for fun, man. I want to feel happy when I pansharpen. So I basically use bicubic or bilinear and know that I’m in a state of sin.
People will do this thing with WV2 and 3, Pléiades, Landsat, Sentinel-2, etc. data where they say “we make RGB data by taking the R, G, and B bands from the multispectral data”. This is misguided, and you can see why if you refer back to that WV3 PDF from 1.4 above. If you use the nominal RGB bands off WV3, then for example a hypothetical spectrally pure yellow object (at the extreme, a monospectral yellow laser) will be … black. Why would you want that? Using the proper color matching function for the full set of bands to XYZ color space and then into sRGB for display yields a mildly better-looking result, with a slightly richer mix of colors. It’s really not something you would notice in most cases unless you flip between the two, but it makes me happy. I hope it also encourages the model to think, from the very beginning, about all the bands and the information that can be extracted not only from each of them but from their relationships.
There’s more to say on the topic of band characteristics, but for now let’s just throw this chum in the water: I think a sophisticated enough model could do substantial spectral superresolution by being really clever about the overlaps of the bands and their overlaps with the pan band. The fact that the bands are not MECE and their averaged response is not the same as the pan band’s response is an advantage and should allow for interesting deductions about ambiguous spectral signatures. (It also suggests a fun question: if you know you’re going to be statistically untangling your bands anyway, what weird multi-overlapping band combination – what spectral equivalent to a coded aperture – would be optimal in practice? You could test this with hyperspectral data.)
If there’s one trick I’ve been playing with where I feel like I might be onto something substantive that others are not yet, it’s in applying pixel shuffles to pansharpening. And yet it has not produced impressive results.
Pixel shuffling (henceforth simply shuffling) is a technique that bijects layers with pixel grids. The first illustration in the paper, the color-coded one, is pretty good. But I’ll also explain it the way I learned about it, backwards, which I think is clearer. Consider the problem of demosaicking Bayer arrays. Most digital camera sensors are tiled in single-color–sensitive RGB sensor pixels in this pattern, the titular array:
RG
GB
Green gets double because the human visual system is basically more sensitive to green than to red or blue. This pattern is then interpolated, using any of a wide variety of techniques, so that each output pixel is converted from having only one band (a.k.a. channel) to having all 3. (As with pansharpening, you could equally call this guided spectral superresolution or guided spatial superresolution.) I learned a lot about CNN-based image processing in general from the excellent repo and paper Learning to See in the Dark – which, n.b., does joint denoising and demosaicking, because doing one and then the other would be foolish, just like pansharpening and then separate feature extraction would be foolish(╬ಠ益ಠ). Figure 3 in the paper shows how the 4 positions in the monomer of the Bayer array are each mapped to a layer. The spatial relationship between the color subsets remains stable and learnable. That is, if one green element goes to layer 1 and the other goes to layer 3, we have not actually (as you might reasonably worry at first glance) lost the fact that one of them is northeast of the other. Therefore, deeper in the network, successive layers can use and adapt spatial information about checkerboard-sampled green light encoded in layer order.
This is an unshuffle operation. (I dislike the terminology, because to me a shuffle preserves dimensionality; I often forget which is shuffle and which is unshuffle. In my own code, they’re called tile and pile.) Its inverse, then, is the last step in that figure: it interleaves pixels from a set of layers into a shallower but wider set of layers. That’s a shuffle.
The strength and weakness of a shuffle is that it’s not adaptive. An (un)shuffle is an unconditional, computationally trivial re-indexing and nothing more. This removes one opportunity for a network to learn how to do domain-optimal upsampling in a spatially explicit way, and forces fine-detail spatial information into layers that could be specialized for feature extraction. However, it’s a very cheap way to upsample, and the network can still interpolate as it sees fit in operations between same-size layer sets, the last of which will be unfurled by the unshuffle.
The fun coincidence here is that when we’re pansharpening, we’re dealing with resizes by powers of 2. That’s what shuffling does!
So here’s what I’ve been doing. Say a “footprint” is the area of one multispectral pixel, containing 16 panchromatic pixels. Say we want output of 256×256. This means that the input pan is 256 on a side, and therefore the input mul is 64 on a side: the area is 64 footprints across. We shuffle the pan pixels twice, so that they go from 1×256×256 to 4×128×128 and finally 16×64×64. Then we concatenate the pan and mul pixels, which works because they are both n×64×64. Now we have a stack of 8 mul bands and 16 pan “positional bands”: 24×64×64 input. If we look at one position in it, which is 24 deep, we see:
Layer 0: the pan pixel at x=0, y=0 within this footprint
Layer 1: the pan pixel at x=0, y=1 within this footprint
⋮
Layer 15: the pan pixel at x=3, y=3 within this footprint
Layer 16: the (only) pixel from the first mul band for this footprint
⋮
Layer 23: the (only) pixel from the last mul band for this footprint
The network will have two shuffles in it, without any particular constraints: maybe they’re at the beginning, the end, spaced out, part of a U-net, whatever; all that matters is there’s a net double shuffle. The upshot is that we used unshuffling as a way to reshape or pseudo-downsample-yet-deepen the pan band’s representation. Then, over the course of the network, we shuffled the pan band back to its input resolution and hoped that, as part of whatever’s going on in there (shrug.gif), the colors of the mul pixels would “stick to” the pan pixels as they spread back out.
Does it work? Not very well. I mean, it works, but there are artifacts and it always takes more memory than it seems like it ought to. Part of me has come around to feeling that it’s sort of precisely the wrong approach: that the way it encourages information to flow is exactly how it should not. Another part of me is sure that it’s very clever and I just need to stop making mistakes in other aspects of the design and training, and one day soon it will really shine.
I hope other people play with the idea. Even if they immediately show why it can never work well, that would save me time.
The little ways that even very good input data is imperfect would take their own entire letter to explore, but let’s hit two big points: band misalignment and the shocking lack of data in the first place.
One problem is that bands are collected at very slightly different times and angles. As a model: The sensor is a 1D array of receptors. They extend across the satellite’s direction of motion – thus the name pushbroom sensor. As the satellite moves smoothly over Earth’s surface, each sensor collects light for some tiny amount of time, quantizes it, moves it onto a data bus, and repeats. Imagine taking a desktop scanner and carrying it glass side down across the room: idealizing, you’d get a swath image of your floor. Same principle. However. To collect multiple bands, each band is facing a slightly different angle ahead of or behind the nadir angle. Imagine you swoop your scanner over your cat, in the head-to-toe direction. The red channel, let’s say, sees the cat first, and by the same token it sees it from slightly in front. Last is, say, the blue channel, which sees the cat a fraction of a second later, and slightly from behind, because it’s aimed just a bit backwards of the scanner’s nadir.
In postprocessing, you use a model of where the scanner was and the shape of the cat, and maybe do some cross-correlation, and you can basically reconcile the slightly different views that the different bands have and merge them into a close-enough aligned multiband package. You only get into trouble around overhangs, where one band saw something that another band didn’t at all. And if the cat was in motion. And if you don’t know the shape of your cat perfectly. The analogs of all these situations arise in satellite imagery. James Bridle’s rainbow planes are an excellent example. And clouds tend to have rainbowy edges because, not being on the ground, a band alignment that aims to converge at the ground will not converge for them. We could go on. Bands are never perfect.
These problems are much worse at native resolution than downsampled. Cars driving on city roads, for example, make clear rainbow fringes at full scale but hardly enough to notice at 1/4 scale. So when we train a network on downsampled imagery it sees cleaner band alignment than real data will have. Given a fully rainbow car, it freaks out and produces unpleasant things like negative radiance. This is a constant headache. (And an argument for gans, which are of course constant headaches.)
Also, and most prohibitive of all, getting data is hard. So far as I know, there is no pansharpening dataset from any major commercial imagery provider that is:
- Large (high gigabytes to low terabytes or so),
- representative of current-generation highest-resolution sensors,
- well distributed (among LULCs, angles, seasons, atmospheric conditions, etc.), and
- unambiguously licensed for open, experimental work outside an organized challenge.
There’s SpaceNet data that meets 2 and I think 4. Some official sample data meets 2 and 4; others meet 2 and may be intended to meet 4 but that’s not how I read the licenses – public experimentation and incidental distribution, not in direct support of a purchasing decision, doesn’t seem to be covered. The Landsat archive meets 1, 3, and 4. The federal government bought some Ikonos-3 data for things like the 2004 Indian Ocean tsunami, and you can get it through EarthExplorer under “Commercial Satellites”; it approaches 2 and probably meets 4. If you have a .gov or .edu e-mail address, there are official channels to get data that meets all 4 criteria. But if you’re just a .org or a person, your options are very limited.
I hope for a future where the people producing this data see the value in a low barrier to entry for weekend-project enthusiasts, non-rockstar researchers, et alia: the kind of people who have developed a lot of the most useful applications of ML lately. I think it’s clear that pansharpening is a subfield where we’re still sort of banging rocks together and getting excited about the sparks. I expect that the best and fastest progress would come from making it something that randos can tackle, the way SISR and Bayer demosaicking are.
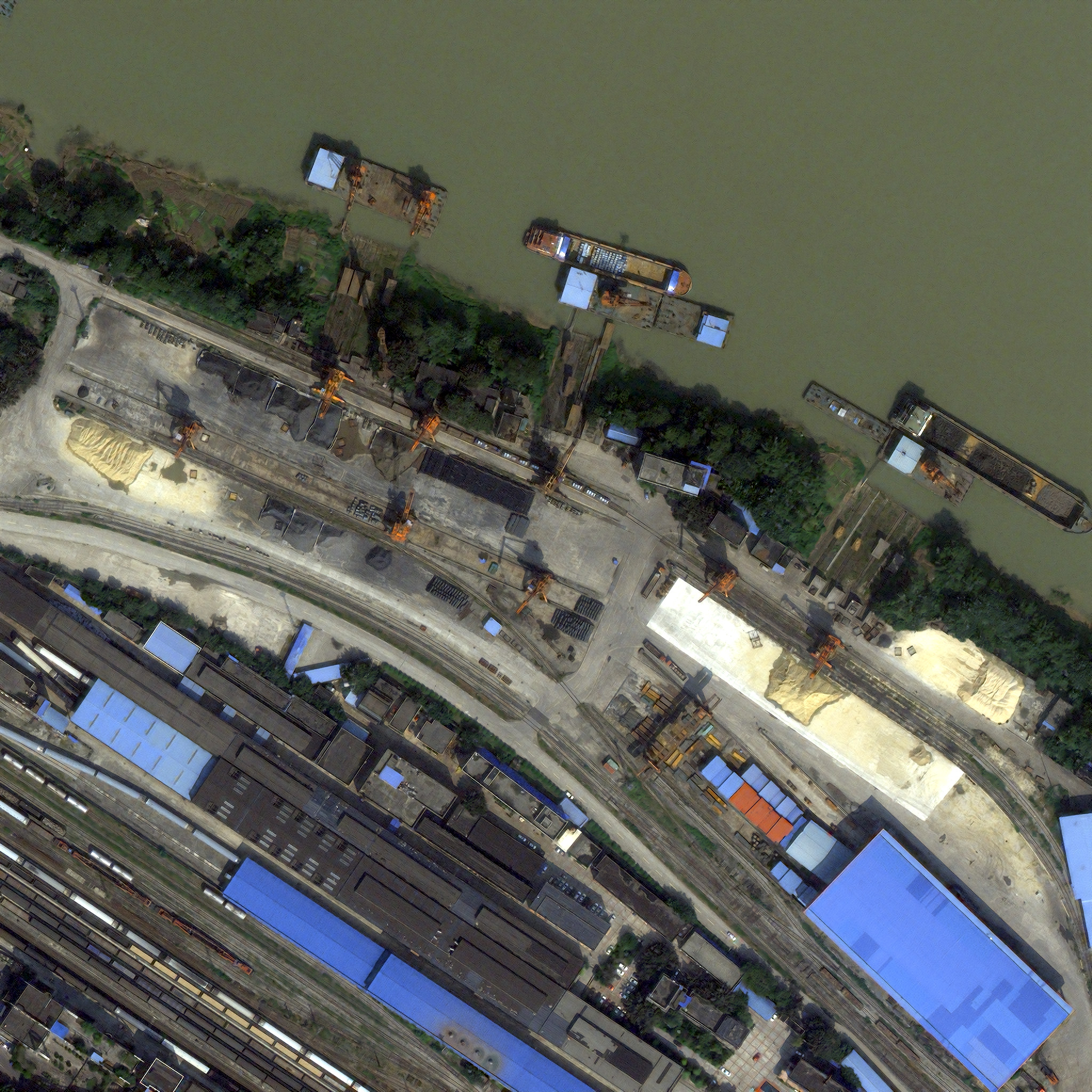
Pull up G**gl* Earth and go to 29.5, 106.538. You’re on a riverside in Chóngqìng. Use the history tool and go to the later of the two images from October 2015. You should see barges and some kind of dredging or sand loading operation. Look especially at edges and color contrasts. Now here’s some output from a network that worked well but whose hyperparameters I lost (natürlich):
{kind=link}
You’ll want to look click through for full size. I’ve done basic contrast and color correction to account for the smog and such. And, look, I suppose I should come clean about the fact that I am also trying to do superresolution at the same time as pansharpening. That is, I’m trying to turn input with 2 m mul and 0.5 m pan into 0.25 m RGB. To see this at nominal resolution, zoom it to 50%. Look for interesting failure cases where red and blue roofs adjoin, and I think we’re seeing the Frei-Chen loss adding a sort of lizard-skin texture to some roofs that should probably be smooth. Train tracks are clearly a big problem; I think China is mostly on 1.435 m gage, which is a good resolution test for a nominally ~50 cm pan band.
There are a lot of model architectures and losses to play with, and I enjoy returning to old failures with new skills. For example, something I had a lot of hope for that just didn’t pan out was a “trellis” approach where there are multiple redundant (shuffle-based) upsampling paths. I still think that has promise but I haven’t found it yet.
As does, for example, a technique based around using Brovey-or-similar as a residual, i.e., having the model provide only the diff from what a classical method produces. In theory, it might help take the model’s mind off the rote work of transmitting basic information down the layers and let it concentrate on more sophisticated “that seems to be a tree, so let’s give it tree texture” fine-tuning stuff.
I’m not actually using a perceptually uniform color space for this training session (it’s YCoCg instead). I should take my own advice there. (It’s complicated, though, given that the radiance to pleasant RGB mapping is nontrivial and probably shouldn’t be part of the model, although this is interestingly arguable.)
I have a lot to learn about loss functions. I still don’t have the intuition I want for Frei-Chen.
I’ve tinkered with inserting random noise to train the model to look out for data problems. AWGN feels too simple. You might have to insert plausibly fake band misalignment into the inputs to really make it work.
To model PSF uncertainty, I’m adding some resampling method noise with a hack too gross to commit to writing.
I don’t have a good sense of how big I want the model to be. The one I was tinkering with today is 200k trainable parameters. That seems big for what it is, yet output gets better when I add more depth. This feels like a bad sign that I will look back on one day and say ”I should have realized I was overdoing it”, but who knows.
Better input data.
That’s what I’ve been doing with pansharpening. I hope at least some of this was interesting to think about. I am eager for any questions, advice, things this reminded you of, etc., yet at the same time I am aware that you are a person with other things to be doing. Also, I assume that there are a few major errors in typing or thinking here that I will realize in the middle of the night and feel embarrassed about, but that’s normal.
Cheers,
Charlie
My immediate take is "band gap".