Created
July 3, 2017 08:05
-
-
Save tsu-nera/89c8b6a6ebdd076aa789ba53fa5c9d9b to your computer and use it in GitHub Desktop.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| import gym | |
| import numpy as np | |
| import gym_tic_tac_toe | |
| import random | |
| from math import floor | |
| import matplotlib.pyplot as plt | |
| env = gym.make('tic_tac_toe-v0') | |
| n_states = 3 ** 9 | |
| n_actions = 9 | |
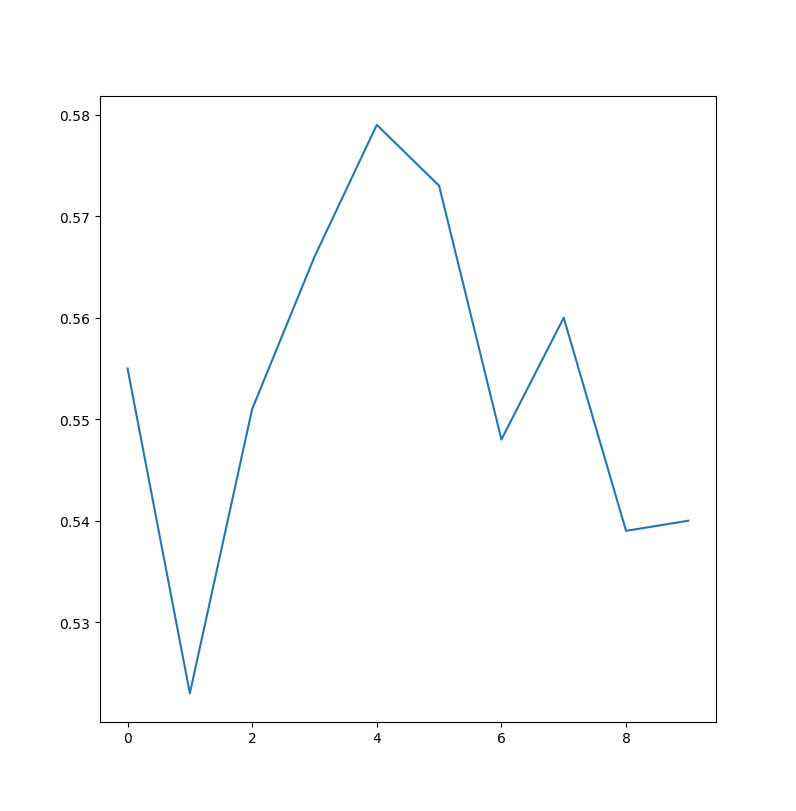
| rate = [] | |
| def sarsa_policy_iteration(L, M, options): | |
| T = 10 | |
| # initiate lookup table | |
| Q = np.zeros((n_states, n_actions)) | |
| for l in range(L): | |
| results = np.zeros(M) | |
| np.random.seed(555) | |
| newQ = np.zeros((n_states, n_actions)) # 更新用価値関数の初期化 | |
| # episode | |
| for m in range(M): | |
| state = env.reset() | |
| state3 = state['board'] | |
| state10 = encode(state3) | |
| done = False | |
| pstate = 0 | |
| paction = 0 | |
| # step | |
| for t in range(T): | |
| # generate policy | |
| policy = np.zeros(n_actions) | |
| policy = select_policy(options, Q, state10, policy) | |
| action, state, reward, done = action_train(t, state3, policy) | |
| state3 = state['board'] | |
| state10 = encode(state3) | |
| if t > 1: | |
| if reward == None: | |
| reward = 0 | |
| newQ[pstate][paction] = newQ[pstate][paction] + \ | |
| options['alpha'] * (reward - newQ[pstate][paction] + options['gamma'] * newQ[state10][action]) | |
| if done or env.move_generator() == []: | |
| if reward == 1: | |
| fin = 2 | |
| elif reward == -1: | |
| fin = 1 | |
| elif reward == 0: | |
| fin = 3 | |
| else: | |
| fin = None | |
| results[m] = fin | |
| break | |
| pstate = state10 | |
| paction = action | |
| Q = newQ | |
| output_results(l, results, M) | |
| rate.append(float(len(results[results == 2])) / M) | |
| ############################################################################### | |
| ############################################################################### | |
| convert = [[0, 1, 2, 3, 4, 5, 6, 7, 8], | |
| [2, 1, 0, 5, 4, 3, 8, 7, 6], | |
| [6, 3, 0, 7, 4, 1, 8, 5, 2], | |
| [0, 3, 8, 1, 4, 7, 2, 5, 8], | |
| [8, 7, 6, 5, 4, 3, 2, 1, 0], | |
| [6, 7, 8, 3, 4, 5, 0, 1, 2], | |
| [2, 5, 8, 1, 4, 7, 0, 3, 6], | |
| [8, 5, 2, 7, 4, 1, 6, 3, 0] | |
| ] | |
| power = np.array([3 ** i for i in range(8, -1, -1)], dtype=np.float64) | |
| def encode1(state3): | |
| ret = np.empty(len(state3)) | |
| for n, i in enumerate(state3): | |
| if i == -1: | |
| ret[n] = 1 | |
| elif i == 1: | |
| ret[n] = 2 | |
| else: | |
| ret[n] = 0 | |
| return ret | |
| def encode2(state3): | |
| cands = [sum(state3[convert[i]] * power) for i in range(len(convert))] | |
| return int(min(cands)) + 1 | |
| def encode(state3): | |
| return encode2(encode1(state3)) | |
| def select_policy(options, Q, state10, policy): | |
| if options['pmode'] == 0: | |
| q = Q[state10] | |
| v = max(q) | |
| a = np.where(q == v)[0][0] | |
| policy[a] = 1 | |
| elif options['pmode'] == 1: | |
| q = Q[state10] | |
| v = max(q) | |
| a = np.where(q == v)[0][0] | |
| policy = np.ones(n_actions) * options['epsilon'] / n_actions | |
| policy[a] = 1 - options['epsilon'] + options['epsilon'] / n_actions | |
| elif options['pmode'] == 2: | |
| policy = np.exp(Q[state10] / options['tau']) / \ | |
| sum(np.exp(Q[state10] / options['tau'])) | |
| return policy | |
| def select_npc_action(step, state3, policy): | |
| a = None | |
| # first step is always select 0 | |
| if step == 0: | |
| return [1, 0] | |
| else: | |
| while 1: | |
| random = np.random.rand() | |
| cprob = 0 | |
| for a in range(n_actions): | |
| cprob += policy[a] | |
| if random < cprob: | |
| break | |
| if state3[a] == 0: | |
| break | |
| return [1, a] | |
| def select_enemy_action(state3, moves): | |
| reach = False | |
| pos = [[0, 1, 2], [3, 4, 5], [6, 7, 8], [0, 3, 6], [1, 4, 7], [1, 5, 8], [0, 4, 8], [2, 4, 6]] | |
| a = None | |
| for i in range(len(pos)): | |
| state_i = state3[pos[i]] | |
| val = sum(state_i) | |
| num = len(state_i[state_i == 0]) | |
| if val == 2 and num == 1: | |
| idx = int(state_i[state_i == 0][0]) | |
| a = pos[i][idx] | |
| if [-1, a] in moves: | |
| reach = True | |
| break | |
| if not reach: | |
| while 1: | |
| a = floor(np.random.rand() * 8) + 1 | |
| if state3[a] == 0: | |
| break | |
| return [-1, a] | |
| def action_train(t, state3, policy): | |
| # select action | |
| npc_action = select_npc_action(t, state3, policy) | |
| # action execute | |
| state, reward, done, _ = env.step(npc_action) | |
| moves = env.move_generator() | |
| if done or moves == []: | |
| return npc_action, state, reward, done | |
| state3 = encode1(state['board']) | |
| enemy_action = select_enemy_action(state3, moves) | |
| # action execute | |
| state, reward, done, _ = env.step(enemy_action) | |
| if not done and reward == 0: | |
| reward = None | |
| return npc_action, state, reward, done | |
| def calculate_discounted_rewards(m, t, rewards, options, drewards): | |
| drewards[m, t] = rewards[m, t] | |
| for pstep in range(t - 1, -1, -1): | |
| drewards[m, pstep] = options['gamma'] * drewards[m, pstep + 1] | |
| return drewards | |
| def output_results(l, results, M): | |
| print('l=%d: Win=%d/%d, Draw=%d/%d, Lose=%d/%d' % | |
| (l, | |
| len(results[results == 2]), M, | |
| len(results[results == 3]), M, | |
| len(results[results == 1]), M)) | |
| def policy_evaluation(M, T, states, actions, drewards, visits): | |
| Q = np.zeros((n_states, n_actions)) | |
| for m in range(M): | |
| for t in range(T): | |
| s = states[m, t] | |
| a = actions[m, t] | |
| s = int(s) | |
| a = int(a) | |
| Q[s, a] += drewards[m, t] | |
| return Q / visits | |
| def getMaxqValue(Q, state, possibleMoves): | |
| if len(possibleMoves) == 0: | |
| return 0.0 | |
| best_q = None | |
| for _, action in possibleMoves: | |
| v = Q[state][action] | |
| if best_q == None or v > best_q: | |
| best_q = v | |
| return best_q | |
| if __name__ == '__main__': | |
| options = {'pmode': 1, 'epsilon': 0.1, 'alpha': 1, 'gamma': 0.9} | |
| sarsa_policy_iteration(10, 1000, options) | |
| plt.plot(range(len(rate)), rate) | |
| plt.show() |
Author
tsu-nera
commented
Jul 3, 2017
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment