👉 check the drlnd_py310 env setup notes
👉 check the p1 env setup notes
👉 course curriculum
👉 Colab notebooks
Nov05
/ 20240223_udacity_drlnd_p2_env.md
Last active
April 15, 2024 18:38
Nov05
/ 20240225_udacity deep reinforcement learning_py310 env setup.md
Last active
April 11, 2024 16:54
Python 3.11 has to be downgraded to Python 3.10, or Multiprocessing will cause TypeError: code() argument 13 must be str, not int in both Windows and Linux. Google Colab is currently using Python 3.10 as well.
Windows 11(64-bit),VSCode,Powershell,Miniconda3,Python 3.10- repo: https://github.com/Nov05/udacity-deep-reinforcement-learning
- working dir: D:\github\
udacity-deep-reinforcement-learning\python - package
deeprlis copied and modified from https://github.com/ShangtongZhang/DeepRL/tree/master/deep_rlinto.\python.
Nov05
/ 20240322_reinforcement learning_neural network soft update.md
Last active
March 22, 2024 12:22
20240322_reinforcement learning_neural network soft update
- trg = trg*(1-τ) + src*τ
- τ is stored in self.config.target_network_mix
def soft_update(self, target, source):
## trg = trg*(1-τ) + src*τ
## τ is stored in self.config.target_network_mix
for target_param, source_param in zip(target.parameters(), source.parameters()):
target_param.detach_()
Nov05
/ 20240211_udacity_drlnd_mlagents.md
Last active
February 25, 2024 11:52
20240211_udacity reinforcement learning unity mlagents env setup
👉 for the course projcts, Unity MLAgents - Banana Collector, etc.
👉 go to the Banana and VisualBanana notebooks
👉 go to the course repo
👉 check course curriculum
Window 11, VSCode, Minicoda, Powershell
Nov05
/ 20240224_You appear to be missing MuJoCo.md
Created
February 24, 2024 17:07
(drlnd_p2) PS D:\github\udacity-deep-reinforcement-learning\python\mujoco-py> python examples\body_interaction.py
You appear to be missing MuJoCo. We expected to find the file here: C:\Users\*\.mujoco\mujoco210
This package only provides python bindings, the library must be installed separately.
Please follow the instructions on the README to install MuJoCo
Nov05
/ 20240222_issue gym.wrappers.Monitor.md
Last active
February 22, 2024 17:03
from gym.wrappers import Monitor caused ImportError: cannot import name 'Monitor' from 'gym.wrappers'.
- solution (2022'):
from gym.wrappers.record_video import RecordVideo env = gym.make('CartPole-v1', render_mode="rgb_array") env = RecordVideo(env, './video', episode_trigger = lambda episode_number: True) env.reset()
Nov05
/ 20240219_reinforcement learning_pong PPO training log 1200e.md
Last active
February 19, 2024 10:31
20240218_pong-PPO.ipynb
👉 training log for reference
1000 episodes, T4 GPU, Wall time: 1h 38min 14s
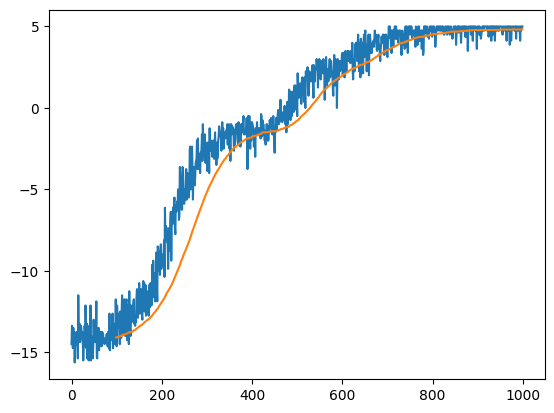
Episode: 20, score: -15.750000
[-16. -16. -16. -16. -16. -16. -16. -14.]
Episode: 40, score: -12.625000
Nov05
/ 20240218_reinforcement learning_pong training log 1200e.md
Created
February 19, 2024 06:00
20240218_reinforcement learning_pong training log 1200e
20240217_pong_REINFORCE.ipynb
👉 training log for reference
1200 episodes on T4 GPU, Wall time: 2h 12min 12s
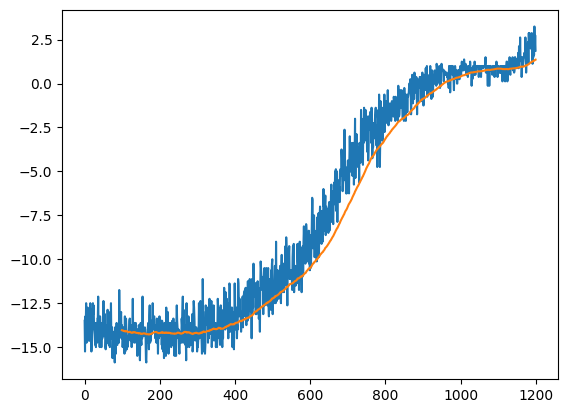
Episode: 20, score: -14.500000
[-14. -15. -16. -13. -14. -16. -16. -12.]
Episode: 40, score: -14.500000
Nov05
/ 20240218_reinforcement learning_pong training log for reference.md
Last active
February 19, 2024 04:05
20240218_reinforcement learning_pong training log for reference
20240217_pong_REINFORCE.ipynb
👉 training log for reference
800 episodes on T4 GPU, Wall time: 1h 17min 44s
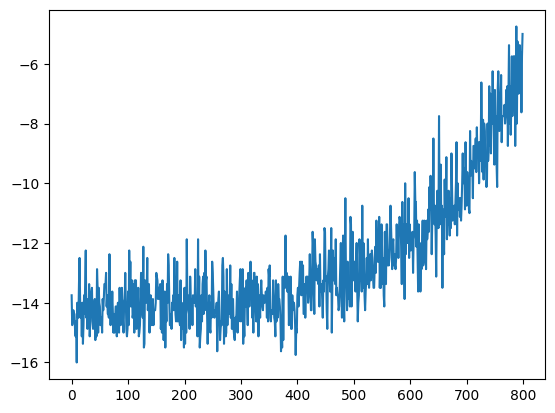
Episode: 20, score: -14.000000
[-15. -17. -15. -14. -13. -13. -16. -9.]
Nov05
/ 20240218_python_PyWhatKit_issue_313.md
Created
February 19, 2024 00:21
20240218 python PyWhatKit issue 313
Ankit404butfound/PyWhatKit#313
---------------------------------------------------------------------------
FileNotFoundError Traceback (most recent call last)
/usr/local/lib/python3.10/dist-packages/Xlib/support/unix_connect.py in get_socket(dname, host, dno)
75 s = socket.socket(socket.AF_UNIX, socket.SOCK_STREAM)
---> 76 s.connect('/tmp/.X11-unix/X%d' % dno)
77 except OSError as val:
NewerOlder