
Matthijs Kooijman matthijskooijman
matthijskooijman
/ gist:0ea492468b5b878c3fd39110bde4f33d
Created
February 28, 2020 07:45
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| #AIOWPS_LOGIN_WHITELIST_START | |
| <FilesMatch "^(wp-login\.php)"> | |
| <IfModule !mod_authz_core.c> | |
| Order Allow,Deny | |
| Allow from www.fablabamersfoort.nl | |
| Allow from 37.97.157.192 | |
| Allow from 145.130.146.23 | |
| Allow from 82.161.203.30 | |
| </IfModule> | |
| <IfModule mod_authz_core.c> |
matthijskooijman
/ Screenshot Smoothie Community.md
Last active
October 1, 2019 12:26
matthijskooijman
/ foo.md
Last active
August 30, 2019 18:45
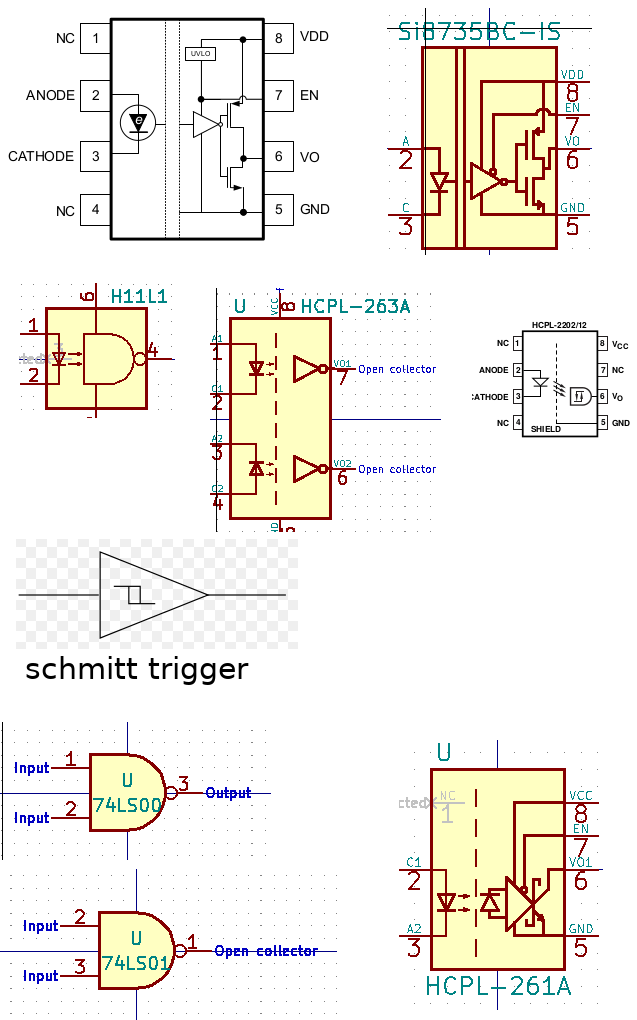
This suggests that the arrow up/down symbol is indeed Schmitt Trigger, and not indicates push-pull (from the TLP2745 datasheet):

matthijskooijman
/ Report.md
Created
July 11, 2019 10:28
Testcase:
$ cat log.ir
declare double @llvm.log.f64(double %Val)
define double @foo() {
start:
%0 = call double @llvm.log.f64(double 1.024000e+03) #8
%1 = call double @llvm.log.f64(double 2.000000e+00) #8
%2 = fdiv double %0, %1
matthijskooijman
/ debdiff.diff
Last active
July 11, 2019 09:11
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| diff -Nru llvm-toolchain-7-7.0.1/debian/changelog llvm-toolchain-7-7.0.1/debian/changelog | |
| --- llvm-toolchain-7-7.0.1/debian/changelog 2019-02-28 13:50:21.000000000 +0100 | |
| +++ llvm-toolchain-7-7.0.1/debian/changelog 2019-03-11 23:51:24.000000000 +0100 | |
| @@ -1,3 +1,41 @@ | |
| +llvm-toolchain-7 (1:7.0.1-8+rpi1) buster-staging; urgency=medium | |
| + | |
| + [changes brought forward from llvm-toolchain-3.8 1:3.8-2+rpi1 by Peter Michael Green <plugwash@raspbian.org> at Sat, 14 May 2016 21:43:35 +0000] | |
| + * Cleanup .pyc files in clean target. | |
| + * Add a hack to the cmake based build to force armv6 (unfortunately the cmake | |
| + based build relies on config.guess which assumes you want to build for the |
matthijskooijman
/ PrintFormat.cpp
Created
June 16, 2019 14:37
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| #include <Arduino.h> | |
| using namespace Formatters; | |
| template <typename T> | |
| inline void debug_type(const T&) __attribute__((deprecated)); | |
| template <typename T> | |
| inline void debug_type() __attribute__((deprecated)); |
matthijskooijman
/ go mod graph after upgrade
Created
April 15, 2019 13:34
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| github.com/3devo/dvconnector github.com/DataDog/zstd@v1.3.8 | |
| github.com/3devo/dvconnector github.com/Sereal/Sereal@v0.0.0-20190409170602-963d7e218945 | |
| github.com/3devo/dvconnector github.com/asdine/storm@v2.1.2+incompatible | |
| github.com/3devo/dvconnector github.com/bob-thomas/configdir@v0.0.0-20181219095810-37a1c27b6286 | |
| github.com/3devo/dvconnector github.com/bob-thomas/go-serial@v0.0.0-20180319113759-0f9c45f81e71 | |
| github.com/3devo/dvconnector github.com/boltdb/bolt@v1.3.1 | |
| github.com/3devo/dvconnector github.com/coreos/etcd@v3.3.12+incompatible | |
| github.com/3devo/dvconnector github.com/coreos/go-semver@v0.3.0 | |
| github.com/3devo/dvconnector github.com/creack/goselect@v0.0.0-20180501195510-58854f77ee8d | |
| github.com/3devo/dvconnector github.com/dgrijalva/jwt-go@v3.2.0+incompatible |
matthijskooijman
/ Test.md
Created
April 11, 2019 08:28
Start a clean module
matthijs@grubby:~/foo$ go mod init foo
Just to get a clean slate, not influenced by my existing $GOPATH
matthijs@grubby:~/foo$ export GOPATH=$(pwd)/build
matthijskooijman
/ gist:f30042723544def18adedc7cea85ec1a
Created
March 26, 2019 13:48
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| 9540f45ec3d8ae8413541fbdfc21c402 /home/matthijs/docs/src/go/pkg/mod/github.com/go-ole/go-ole@v1.2.2/itypeinfo_func.go | |
| 3260b948a31ab48638fb99ed70b13e45 /home/matthijs/docs/src/go/pkg/mod/github.com/go-ole/go-ole@v1.2.2/variant_ppc64le.go | |
| 9367f0d34ea8f6bf9c81b241bf50920f /home/matthijs/docs/src/go/pkg/mod/github.com/go-ole/go-ole@v1.2.2/iinspectable_windows.go | |
| 7326db50c2d71ed0b0ca841d49b9e63e /home/matthijs/docs/src/go/pkg/mod/github.com/go-ole/go-ole@v1.2.2/LICENSE | |
| 81540614b01d7ce4cf8d0708ff553854 /home/matthijs/docs/src/go/pkg/mod/github.com/go-ole/go-ole@v1.2.2/variant_amd64.go | |
| 5c48b162b6a51fa11748ba87e7a90f18 /home/matthijs/docs/src/go/pkg/mod/github.com/go-ole/go-ole@v1.2.2/build/register-assembly.bat | |
| 83a1fcfd0033f30447e1646862ccdcda /home/matthijs/docs/src/go/pkg/mod/github.com/go-ole/go-ole@v1.2.2/go.sum | |
| 81a59b53e59243eabf4c5e215ab4ceb7 /home/matthijs/docs/src/go/pkg/mod/github.com/go-ole/go-ole@v1.2.2/itypeinfo.go | |
| 56372d1f0a250415d7056d656889283d /home/matthijs/docs/src/go/pkg/mod/github.com/go |
matthijskooijman
/ gist:ea3b7818f9be3cd1e2489ae0d8507d30
Created
March 14, 2019 10:48
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Bij het ontwerp van het MJS meetstation is evoor gekozen om zo min mogelijk | |
| "moeilijke" componenten te gebruiken. | |
| De schakeling is zo opgebouwd dat de sensor met twee stroommeetweerstanden kan | |
| worden uitgelezen. | |
| Om het aantal verschillende weerstandswaarden in het bouwpakket te beperken is | |
| zijn daarvoor 10K (R11) en 100K (R12) gekozen. Dit | |
| zijn de standaard waarden die in het bouwpakket zitten. | |
| Door R11 te verkleinen naar bijvoorbeeld 2K2 kan je het bereik van de sensor | |
| verhogen. | |
| In de code dien je dan de waarde voor R11 aan te passen: |