Reference:
https://wiki.luckfox.com/zh/Luckfox-Pico/Luckfox-Pico-GPIO
My USB to UART Cabe

adb devices
adb -s ${id} shellReference:
https://wiki.luckfox.com/zh/Luckfox-Pico/Luckfox-Pico-GPIO
My USB to UART Cabe
adb devices
adb -s ${id} shellSPI LCD Demo
Reference:https://wiki.luckfox.com/zh/Luckfox-Pico/Luckfox-Pico-LCD

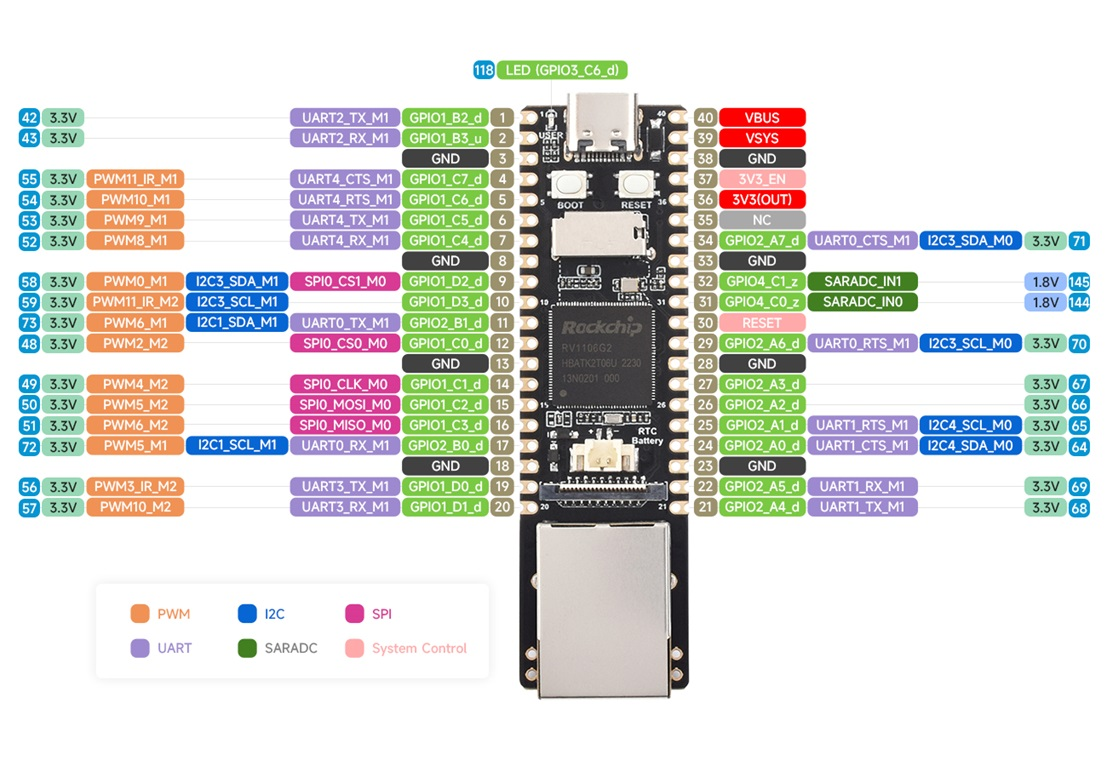
Compare Pico LCD 2's GPIO Layout & LuckFox Pico's,The GPIOs used are:
BL - 72 - GPIO2-PB0
RST - 51 - GPIO1-PC3
DIN - 50 - GPIO1-PC2
CLK - 49 - GPIO1-PC1
CS - 48 - GPIO1-PC0
DC - 73 - GPIO2-PB1
// SPDX-License-Identifier: (GPL-2.0+ OR MIT)
/*
* Copyright (c) 2022 Rockchip Electronics Co., Ltd.
*/
/dts-v1/;
#include "rv1106.dtsi"
#include "rv1106-evb.dtsi"
#include "rv1106-luckfox-pico-pro-max-ipc.dtsi"
/ {
model = "Luckfox Pico Max";
compatible = "rockchip,rv1103g-38x38-ipc-v10", "rockchip,rv1106";
};
/**********GPIO**********/
/{
/*KEY*/
gpio2pa5:gpio2pa5 {
compatible = "regulator-fixed";
pinctrl-names = "default";
pinctrl-0 = <&gpio2_pa5>;
regulator-name = "gpio2_pa5";
regulator-always-on;
};
gpio1pc6:gpio1pc6 {
compatible = "regulator-fixed";
pinctrl-names = "default";
pinctrl-0 = <&gpio1_pc6>;
regulator-name = "gpio1_pc6";
regulator-always-on;
};
gpio1pc7:gpio1pc7 {
compatible = "regulator-fixed";
pinctrl-names = "default";
pinctrl-0 = <&gpio1_pc7>;
regulator-name = "gpio1_pc7";
regulator-always-on;
};
gpio1pd1:gpio1pd1 {
compatible = "regulator-fixed";
pinctrl-names = "default";
pinctrl-0 = <&gpio1_pd1>;
regulator-name = "gpio1_pd1";
regulator-always-on;
};
/*RESET*/
gpio1pc3:gpio1pc3 {
compatible = "regulator-fixed";
pinctrl-names = "default";
pinctrl-0 = <&gpio1_pc3>;
regulator-name = "gpio1_pc3";
regulator-always-on;
};
/*BL*/
gpio2pb0:gpio2pb0 {
compatible = "regulator-fixed";
pinctrl-names = "default";
pinctrl-0 = <&gpio2_pb0>;
regulator-name = "gpio2_pb0";
regulator-always-on;
};
};
&pinctrl {
/*KEY*/
gpio2-pa5 {
gpio2_pa5:gpio2-pa5 {
rockchip,pins = <2 RK_PA5 RK_FUNC_GPIO &pcfg_pull_up>;
};
};
gpio1-pc6 {
gpio1_pc6:gpio1-pc6 {
rockchip,pins = <1 RK_PC6 RK_FUNC_GPIO &pcfg_pull_up>;
};
};
gpio1-pc7 {
gpio1_pc7:gpio1-pc7 {
rockchip,pins = <1 RK_PC7 RK_FUNC_GPIO &pcfg_pull_up>;
};
};
gpio1-pd1 {
gpio1_pd1:gpio1-pd1 {
rockchip,pins = <1 RK_PD1 RK_FUNC_GPIO &pcfg_pull_up>;
};
};
/*RESET*/
gpio1-pc3 {
gpio1_pc3:gpio1-pc3 {
rockchip,pins = <1 RK_PC3 RK_FUNC_GPIO &pcfg_pull_none>;
};
};
/*BL*/
gpio2-pb0 {
gpio2_pb0:gpio2-pb0 {
rockchip,pins = <2 RK_PB0 RK_FUNC_GPIO &pcfg_pull_none>;
};
};
};
/**********FLASH**********/
&sfc {
status = "okay";
flash@0 {
compatible = "spi-nand";
reg = <0>;
spi-max-frequency = <75000000>;
spi-rx-bus-width = <4>;
spi-tx-bus-width = <1>;
};
};
/**********SDMMC**********/
&sdmmc {
max-frequency = <50000000>;
no-sdio;
no-mmc;
bus-width = <4>;
cap-mmc-highspeed;
cap-sd-highspeed;
disable-wp;
pinctrl-names = "default";
pinctrl-0 = <&sdmmc0_clk &sdmmc0_cmd &sdmmc0_det &sdmmc0_bus4>;
status = "okay";
};
/**********SDIO**********/
// &sdio {
// max-frequency = <50000000>;
// no-sdio;
// no-mmc;
// bus-width = <4>;
// cap-mmc-highspeed;
// cap-sd-highspeed;
// disable-wp;
// pinctrl-names = "default";
// pinctrl-0 = <&sdmmc1m0_cmd &sdmmc1m0_clk &sdmmc1m0_bus4 &clk_32k>;
// status = "okay";
// };
/**********ETH**********/
&gmac {
status = "okay";
};
/**********USB**********/
&usbdrd_dwc3 {
status = "okay";
dr_mode = "peripheral";
};
/**********I2C**********/
// &i2c1 {
// status = "okay";
// pinctrl-0 = <&i2c1m1_xfer>;
// clock-frequency = <100000>;
// };
&i2c3 {
status = "okay";
pinctrl-0 = <&i2c3m1_xfer>;
clock-frequency = <100000>;
};
// /**********SPI**********/
&spi0 {
status = "okay";
pinctrl-names = "default";
pinctrl-0 = <&spi0m0_pins>;
cs-gpios = <&gpio1 RK_PC0 1>;
// cs-gpios = <&gpio1 26 1>;
#address-cells = <1>;
#size-cells = <0>;
spidev@0 {
compatible = "rockchip,spidev";
spi-max-frequency = <1000000000>;
reg = <0>;
};
};
&pinctrl {
spi0 {
/omit-if-no-ref/
spi0m0_pins: spi0m0-pins {
rockchip,pins =
/* spi0_clk_m0 */
<1 RK_PC1 4 &pcfg_pull_none>,
/* spie_miso_m0 */
/* <1 RK_PC3 6 &pcfg_pull_none>, */
/* spi_mosi_m0 */
<1 RK_PC2 6 &pcfg_pull_none>;
};
};
};
/**********UART**********/
// &uart0 {
// status = "okay";
// pinctrl-names = "default";
// pinctrl-0 = <&uart0m1_xfer>;
// };
// &uart1 {
// status = "okay";
// pinctrl-names = "default";
// pinctrl-0 = <&uart1m1_xfer>;
// };
&uart3 {
status = "okay";
pinctrl-names = "default";
pinctrl-0 = <&uart3m1_xfer>;
};
&uart4 {
status = "okay";
pinctrl-names = "default";
pinctrl-0 = <&uart4m1_xfer>;
};
// /**********PWM**********/
// &pwm0 {
// status = "okay";
// pinctrl-names = "active";
// pinctrl-0 = <&pwm0m0_pins>;
// // pinctrl-0 = <&pwm0m1_pins>;
// };
// &pwm1 {
// status = "okay";
// pinctrl-names = "active";
// pinctrl-0 = <&pwm1m0_pins>;
// // pinctrl-0 = <&pwm1m1_pins>;
// };
//&pwm2 {
// status = "okay";
// pinctrl-names = "active";
// pinctrl-0 = <&pwm2m2_pins>;
//};
//&pwm3 {
// status = "okay";
// pinctrl-names = "active";
// pinctrl-0 = <&pwm3m2_pins>;
//};
//&pwm4 {
// status = "okay";
// pinctrl-names = "active";
// pinctrl-0 = <&pwm4m2_pins>;
//};
&pwm5 {
status = "okay";
pinctrl-names = "active";
pinctrl-0 = <&pwm5m1_pins>;
// pinctrl-0 = <&pwm5m2_pins>;
};
&pwm6 {
status = "okay";
pinctrl-names = "active";
pinctrl-0 = <&pwm6m1_pins>;
// pinctrl-0 = <&pwm6m2_pins>;
};
//&pwm7 {
// status = "okay";
// pinctrl-names = "active";
// pinctrl-0 = <&pwm7m2_pins>;
//};
//&pwm8 {
// status = "okay";
// pinctrl-names = "active";
// // pinctrl-0 = <&pwm8m1_pins>;
// pinctrl-0 = <&pwm8m0_pins>;
//};
//&pwm9 {
// status = "okay";
// pinctrl-names = "active";
// // pinctrl-0 = <&pwm9m1_pins>;
// pinctrl-0 = <&pwm9m0_pins>;
//};
&pwm10 {
status = "okay";
pinctrl-names = "active";
pinctrl-0 = <&pwm10m1_pins>;
// pinctrl-0 = <&pwm10m2_pins>;
// pinctrl-0 = <&pwm10m0_pins>;
};
&pwm11 {
status = "okay";
pinctrl-names = "active";
pinctrl-0 = <&pwm11m1_pins>;
// pinctrl-0 = <&pwm11m2_pins>;
// pinctrl-0 = <&pwm11m0_pins>;
};
&rtc {
status = "okay";
};
Recompile
cd ~/Luckfox-Pico/luckfox-pico
./build.sh clean
./build.sh
Burn the system via SocToolKit
Modify Makefile,
gcc path: <SDK directory\>/tools/linux/toolchain/arm-rockchip830-linux-uclibcgnueabihf/bin/arm-rockchip830-linux-uclibcgnueabihf-gcc
CC=home/luckfox/Luckfox-Pico/luckfox-pico/tools/linux/toolchain/arm-rockchip830-linux-uclibcgnueabihf/bin/arm-rockchip830-linux-uclibcgnueabihf-gcc
DEV_Conig.h in c/lib/Config
for Pico LCD 2inch
| define in code | Printed Name in LCD Board | Pin number |
|---|---|---|
| GET_KEY1 | KEY0 | 57 |
| GET_KEY2 | KEY1 | 69 |
| GET_KEY_UP | KEY2 | 55 |
| GET_KEY_PRESS | KEY3 | 54 |
/*****************************************************************************
* | File : DEV_Config.h
* | Author : Luckfox team
* | Function : Hardware underlying interface
* | Info :
*----------------
* | This version: V2.0
* | Date : 2019-07-08
* | Info : Basic version
*
******************************************************************************/
#ifndef _DEV_CONFIG_H_
#define _DEV_CONFIG_H_
#include "Debug.h"
#define USE_DEV_LIB 1
#ifdef USE_DEV_LIB
#include "sysfs_gpio.h"
#include "dev_hardware_SPI.h"
#include <stdio.h>
#include <unistd.h>
#include <stdlib.h>
#include <pthread.h>
// #define USE_DEV_LIB_PWM
#endif
#include <unistd.h>
#include <errno.h>
#include <stdio.h>
#include <string.h>
#include <stdint.h>
/**
* data
**/
#define UBYTE uint8_t
#define UWORD uint16_t
#define UDOUBLE uint32_t
// #define LCD_DC (34)
// #define LCD_CS (48)
// #define LCD_RST (51)
// #define LCD_BL (4)
#define LCD_DC (73)
#define LCD_CS (48)
#define LCD_RST (51)
#define LCD_BL (72)
//LCD
#define LCD_CS_0 DEV_Digital_Write(LCD_CS,0)
#define LCD_CS_1 DEV_Digital_Write(LCD_CS,1)
#define LCD_RST_0 DEV_Digital_Write(LCD_RST,0)
#define LCD_RST_1 DEV_Digital_Write(LCD_RST,1)
#define LCD_DC_0 DEV_Digital_Write(LCD_DC,0)
#define LCD_DC_1 DEV_Digital_Write(LCD_DC,1)
#define LCD_BL_0 DEV_Digital_Write(LCD_BL,0)
#define LCD_BL_1 DEV_Digital_Write(LCD_BL,1)
/*PICO*/
// #define KEY_UP_PIN 55
// #define KEY_DOWN_PIN 134
// #define KEY_LEFT_PIN 137
// #define KEY_RIGHT_PIN 131
// #define KEY_PRESS_PIN 54
// #define KEY1_PIN 57
// #define KEY2_PIN 136
// #define KEY3_PIN 16
// #define KEYA_PIN 57
// #define KEYB_PIN 136
// #define KEYX_PIN 130
// #define KEYY_PIN 132
/*PLUS*/
#define KEY_UP_PIN 55
#define KEY_DOWN_PIN 101
#define KEY_LEFT_PIN 102
#define KEY_RIGHT_PIN 98
#define KEY_PRESS_PIN 54
#define KEY1_PIN 57
#define KEY2_PIN 69 //103
#define KEY3_PIN 16
#define KEYA_PIN 57
#define KEYB_PIN 103
#define KEYX_PIN 100
#define KEYY_PIN 99
#define GET_KEY_UP DEV_Digital_Read(KEY_UP_PIN) //
#define GET_KEY_DOWN DEV_Digital_Read(KEY_DOWN_PIN)
#define GET_KEY_LEFT DEV_Digital_Read(KEY_LEFT_PIN)
#define GET_KEY_RIGHT DEV_Digital_Read(KEY_RIGHT_PIN)
#define GET_KEY_PRESS DEV_Digital_Read(KEY_PRESS_PIN) //
#define GET_KEY1 DEV_Digital_Read(KEY1_PIN) //
#define GET_KEY2 DEV_Digital_Read(KEY2_PIN) //
#define GET_KEY3 DEV_Digital_Read(KEY3_PIN)
#define GET_KEYA DEV_Digital_Read(KEYA_PIN)
#define GET_KEYB DEV_Digital_Read(KEYB_PIN)
#define GET_KEYX DEV_Digital_Read(KEYX_PIN)
#define GET_KEYY DEV_Digital_Read(KEYY_PIN)
#define LCD_SetBacklight(Value) DEV_SetBacklight(Value)
/*------------------------------------------------------------------------------------------------------*/
UBYTE DEV_ModuleInit(void);
void DEV_ModuleExit(void);
void DEV_GPIO_Mode(UWORD Pin, UWORD Mode);
void DEV_Digital_Write(UWORD Pin, UBYTE Value);
UBYTE DEV_Digital_Read(UWORD Pin);
void DEV_Delay_ms(UDOUBLE xms);
void DEV_SPI_WriteByte(UBYTE Value);
void DEV_SPI_Write_nByte(uint8_t *pData, uint32_t Len);
void DEV_SetBacklight(UWORD Value);
#endifCompile the code:
make clean
make
Copy main file to LuckFox Pico Max
adb -s <device id> push <src> <dest>
adb -s <device id> shell
cd <dest>
chmod 777 main
./main <LCD inch number>
SDK Environmenthttps://wiki.luckfox.com/zh/Luckfox-Pico/Core3566-SDK
sudo ./VBoxLinuxAdditions.run