1. 概述
YOLOV3TargetMerger 这个类的实例是怎么被创建的? 是在 YOLOV3 中被创建的, 如下所示, 其中 ignore_iou_thresh 的默认值是 0.7
if pos_iou_thresh >= 1:
self._target_generator = YOLOV3TargetMerger(len(classes), ignore_iou_thresh)
else:
raise NotImplementedError(
"pos_iou_thresh({}) < 1.0 is not implemented!".format(pos_iou_thresh))- ignore_iou_thresh 的默认值是 0.7
在 YOLOV3 的 hybrid_forward 中被调用:
all_targets = self._target_generator(box_preds, *args)2. 代码解读
class YOLOV3TargetMerger(gluon.HybridBlock):
"""YOLOV3 target merger that merges the prefetched targets and dynamic targets.
Parameters
----------
num_class : int
Number of foreground classes.
ignore_iou_thresh : float
Anchors that has IOU in `range(ignore_iou_thresh, pos_iou_thresh)` don't get
penalized of objectness score.
"""
def __init__(self, num_class, ignore_iou_thresh, **kwargs):
super(YOLOV3TargetMerger, self).__init__(**kwargs)
self._num_class = num_class
self._dynamic_target = YOLOV3DynamicTargetGeneratorSimple(num_class, ignore_iou_thresh)
self._label_smooth = False - Anchors 的 IOU 介于 ignore_iou_thresh (0.7) 和 pos_iou_thresh (1.0) 之间的 objectness 不会被惩罚
def hybrid_forward(self, F, box_preds, gt_boxes, obj_t, centers_t, scales_t, weights_t, clas_t):输入:
- box_preds 是 (B, H_1 x W_1 x num_anchors + ... + H_3 x W_3 x num_anchors, 4) 的 mx.ndarray
- gt_boxes 是 (B, M_max, 4) 的 mxnet.ndarray,是 [xmin, ymin, xmax, ymax] 的 Corner 编码
- obj_t 是 (B, H_3 x W_3 x 3 + H_2 x W_2 x 3 + H_1 x W_1 x 3, 1) 的 mx.ndarray, 在不用 mixup 的情况下,匹配 anchor 的数值为 1
- centers_t 是 (B, H_3 x W_3 x 3 + H_2 x W_2 x 3 + H_1 x W_1 x 3, 2) 的 mx.ndarray
- scales_t 是 (B, H_3 x W_3 x 3 + H_2 x W_2 x 3 + H_1 x W_1 x 3, 2) 的 mx.ndarray
- weights_t 是 (B, H_3 x W_3 x 3 + H_2 x W_2 x 3 + H_1 x W_1 x 3, 2) 的 mx.ndarray
- clas_t 是 (B, H_3 x W_3 x 3 + H_2 x W_2 x 3 + H_1 x W_1 x 3, num_class) 的 mx.ndarray
with autograd.pause():
dynamic_t = self._dynamic_target(box_preds, gt_boxes)with autograd.pause():里面的代码不会去计算梯度- all_targets 是一个 tuple, (objness_t, class_t, scale_t, weight_t, class_t), 具体内容是:
- objness_t 是 (B, N, 1) 的 mx.ndarray, N = H_1 x W_1 x num_anchors + ... + H_3 x W_3 x num_anchors
- center_t 是一个 (B, N, 2) 的 全零 mx.ndarray, N = H_1 x W_1 x num_anchors + ... + H_3 x W_3 x num_anchors
- scale_t 是一个 (B, N, 2) 的 全零 mx.ndarray, N = H_1 x W_1 x num_anchors + ... + H_3 x W_3 x num_anchors
- weight_t 是一个 (B, N, 2) 的 全零 mx.ndarray, N = H_1 x W_1 x num_anchors + ... + H_3 x W_3 x num_anchors
- class_t 是一个 (B, N, num_class) 的 mx.ndarray, 数值都是 -1, N = H_1 x W_1 x num_anchors + ... + H_3 x W_3 x num_anchors
# use fixed target to override dynamic targets
obj, centers, scales, weights, clas = zip(
dynamic_t, [obj_t, centers_t, scales_t, weights_t, clas_t])- dynamic_t 这个 Tuple 是由 YOLOV3DynamicTargetGeneratorSimple 产生的 (objness_t, center_t, scale_t, weight_t, class_t)
- [obj_t, centers_t, scales_t, weights_t, clas_t] 是被调用时传入的 List
- zip 函数的作用是将彼此对应的 mx.ndarray 打包成一个 List, 具体如下:
- obj 是一个 List of mx.ndarray, 第一个元素是 YOLOV3DynamicTargetGeneratorSimple 产生的 objness_t, 第二个是传入的 obj_t
- centers 是一个 List of mx.ndarray, 第一个元素是 YOLOV3DynamicTargetGeneratorSimple 产生的 centers_t, 第二个是传入的 centers_t
- scales 是一个 List of mx.ndarray, 第一个元素是 YOLOV3DynamicTargetGeneratorSimple 产生的 scale_t, 第二个是传入的 scales_t
- weights 是一个 List of mx.ndarray, 第一个元素是 YOLOV3DynamicTargetGeneratorSimple 产生的 weight_t, 第二个是传入的 weights_t
- clas 是一个 List of mx.ndarray, 第一个元素是 YOLOV3DynamicTargetGeneratorSimple 产生的 class_t, 第二个是传入的 clas_t
mask = obj[1] > 0
objectness = F.where(mask, obj[1], obj[0])- obj[0] 是 YOLOV3DynamicTargetGeneratorSimple 产生的 (B, N, 1) 的 mx.ndarray, 是由 box_preds 和 gt_boxes 计算 iou (B, N, M) 后, 取出每个 pred box 对应最大的 iou 数值得到 (B, N, 1) 的 mx.ndarray, 然后比较 self._ignore_iou_thresh (默认是 0.7), 如果 iou 数值大于这个阈值就将其设置为 -1, 其他为 0
- obj[1] 是 YOLOV3PrefetchTargetGenerator 产生的 objectness, 是由预设的 anchors 和 gt_boxes 计算 iou 后, 取出每个 anchor 对应对应最大的 iou 数值得到 (B, N, 1) 的 mx.ndarray, 对应的 anchor 设置为 1, 其余都为 0
- mask 是以 obj[1] 为标准, 如果 obj[1] 中的数值为 1 或者 大于 0, 那么 mask 的数值就为 1, 否则就为 0
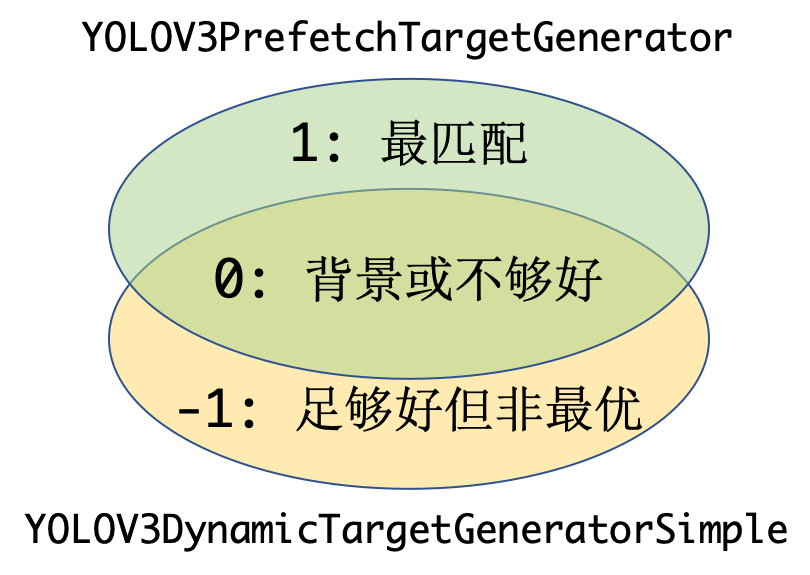
- objectness 也就是说 当 YOLOV3PrefetchTargetGenerator 产生的 objectness 大于 0 时, 就选用 YOLOV3PrefetchTargetGenerator 的 (anchors 和 gt_boxes), 其余就采用 YOLOV3DynamicTargetGeneratorSimple 产生的 (box_preds 和 gt_boxes), 这种做法其实就是注释上写得 use fixed target to override dynamic targets, 对于 YOLOV3PrefetchTargetGenerator 中标记为 1 的覆盖 YOLOV3DynamicTargetGeneratorSimple 产生的对应位置上的数值, 其他还是用 YOLOV3DynamicTargetGeneratorSimple 产生的
- objness 中的 1 表示是最匹配的 anchor, 为 0 表示 iou 数值小于 ignore thresh, -1 表示并非 iou 最高但是大于 ignore_iou_thresh 的 anchor, 具体如下图所示
看一下 YOLOv3 论文中对于 anchor 的 objectness 的策略:
- This should be 1 if the bounding box prior overlaps a ground truth object by more than any other bounding box prior. (这是 YOLOV3DynamicTargetGeneratorSimple 负责的,
ious_max = batch_ious.max(axis=-1, keepdims=True) # (B, N, 1)) - If the bounding box prior is not the best but does overlap a ground truth object by more than some threshold we ignore the prediction, follow faster r-cnn (这也是 YOLOV3DynamicTargetGeneratorSimple 负责的,
objness_t = (ious_max > self._ignore_iou_thresh) * -1 # use -1 for ignored这里把所有大于 thresh 的设置成了 -1 ) - Only assigns one bounding box prior for each ground truth object. If a bounding box prior is not assigned to a ground truth object it incurs no loss for coordinate or class predic- tions, only objectness (这部分用 override 来实现, override 保证了 Only assigns one bounding box prior for each ground truth object, 具体哪个 anchor 由 YOLOV3PrefetchTargetGenerator 来决定)
mask2 = mask.tile(reps=(2,))
center_targets = F.where(mask2, centers[1], centers[0])
scale_targets = F.where(mask2, scales[1], scales[0])
weights = F.where(mask2, weights[1], weights[0])- 同理, 将 YOLOV3PrefetchTargetGenerator 中 objness 标记为 1 的数值 override YOLOV3DynamicTargetGeneratorSimple 产生的 center_targets, scale_targets 和 weights 对应位置上的数值
mask3 = mask.tile(reps=(self._num_class,))
class_targets = F.where(mask3, clas[1], clas[0])- 传入的 clas[1] 是由 YOLOV3PrefetchTargetGenerator 产生的 class_targets, 与 gt box 最匹配的 anchor 是 1, 同一个 feature map 点上的其他尺寸 anchor 是 0, 其余没有背景区域的 anchors 都是 -1
- clas[0] 是由 YOLOV3DynamicTargetGeneratorSimple 产生的 class_t, 里面的数值都是 -1
- 同理, 将 YOLOV3PrefetchTargetGenerator 中 objness 标记为 1 的数值 override YOLOV3DynamicTargetGeneratorSimple 产生的 class_targets 对应位置上的数值, 具体的说是 objness 为 1 的 anchor 为对应的 cls id, 其余全部都为 -1.
smooth_weight = 1. / self._num_class
if self._label_smooth:
smooth_weight = min(1. / self._num_class, 1. / 40)
class_targets = F.where(
class_targets > 0.5, class_targets - smooth_weight, class_targets)
class_targets = F.where(
(class_targets < -0.5) + (class_targets > 0.5),
class_targets, F.ones_like(class_targets) * smooth_weight)- self._label_smooth 默认是 False 的, 就暂时先不解读了.
class_mask = mask.tile(reps=(self._num_class,)) * (class_targets >= 0)
return [F.stop_gradient(x) for x in [objectness, center_targets, scale_targets,
weights, class_targets, class_mask]]- class_targets >= 0 这个掩膜跟 mask.tile(reps=(self._num_class,)) 一样啊
输出:
- objectness 是 (B, N, 1) 的 mx.ndarray, N = H_1 x W_1 x num_anchors + ... + H_3 x W_3 x num_anchors, 数值: 1 表示是最匹配的 anchor, 为 0 表示 iou 数值小于 ignore thresh, -1 表示并非 iou 最高但是大于 ignore_iou_thresh 的 anchor
- center_targets 是一个 (B, N, 2) 的 mx.ndarray, N = H_1 x W_1 x num_anchors + ... + H_3 x W_3 x num_anchors, 数值: 在 objness 为 1 的 anchor 上数值为在原图上 gt box 中心与所属 cell 左上角的归一化距离 (以 cell 长或宽的归一化距离), 在 objness 不为 0 的 anchor 上的数值为 0
- scale_targets 是一个 (B, N, 2) 的 全零 mx.ndarray, N = H_1 x W_1 x num_anchors + ... + H_3 x W_3 x num_anchors
- weights 是一个 (B, N, 2) 的 全零 mx.ndarray, N = H_1 x W_1 x num_anchors + ... + H_3 x W_3 x num_anchors
- class_targets 是一个 (B, N, num_class) 的 mx.ndarray, 数值都是 -1, N = H_1 x W_1 x num_anchors + ... + H_3 x W_3 x num_anchors
- class_mask 是 (B, N, num_class) 的 mx.ndarray, 匹配 anchor 上的数值为 1, 其余为 0, N = H_1 x W_1 x num_anchors + ... + H_3 x W_3 x num_anchors
def hybrid_forward(self, F, box_preds, gt_boxes):输入:
- box_preds 是 (B, H_1 x W_1 x num_anchors + ... + H_3 x W_3 x num_anchors, 4) 的 mx.ndarray
- gt_boxes 是 (B, M, 4) 的 mxnet.ndarray,是 [xmin, ymin, xmax, ymax] 的 Corner 编码
with autograd.pause():
box_preds = box_preds.reshape((0, -1, 4))
objness_t = F.zeros_like(box_preds.slice_axis(axis=-1, begin=0, end=1))
center_t = F.zeros_like(box_preds.slice_axis(axis=-1, begin=0, end=2))
scale_t = F.zeros_like(box_preds.slice_axis(axis=-1, begin=0, end=2))
weight_t = F.zeros_like(box_preds.slice_axis(axis=-1, begin=0, end=2))
class_t = F.ones_like(objness_t.tile(reps=(self._num_class))) * -1
batch_ious = self._batch_iou(box_preds, gt_boxes) # (B, N, M)
ious_max = batch_ious.max(axis=-1, keepdims=True) # (B, N, 1)
objness_t = (ious_max > self._ignore_iou_thresh) * -1 # use -1 for ignored
return objness_t, center_t, scale_t, weight_t, class_t - reshape 之后的 box_preds 还是 (B, H_1 x W_1 x num_anchors + ... + H_3 x W_3 x num_anchors, 4) 的 mx.ndarray
- objness_t 是一个 (B, H_1 x W_1 x num_anchors + ... + H_3 x W_3 x num_anchors, 1) 的 全零 mx.ndarray
- center_t 是一个 (B, H_1 x W_1 x num_anchors + ... + H_3 x W_3 x num_anchors, 2) 的 全零 mx.ndarray
- scale_t 是一个 (B, H_1 x W_1 x num_anchors + ... + H_3 x W_3 x num_anchors, 2) 的 全零 mx.ndarray
- weight_t 是一个 (B, H_1 x W_1 x num_anchors + ... + H_3 x W_3 x num_anchors, 2) 的 全零 mx.ndarray
- class_t 是一个 (B, H_1 x W_1 x num_anchors + ... + H_3 x W_3 x num_anchors, num_class) 的 mx.ndarray, 数值都是 -1
- batch_ious 后得到的是 (B, N, M) 的 mx.ndarray, N 是 H_1 x W_1 x num_anchors + ... + H_3 x W_3 x num_anchors
- ious_max 是 (B, N, 1) 的 mx.ndarray
- objness_t 是 (B, N, 1) 的 mx.ndarray, self._ignore_iou_thresh 的默认值是 0.7, 大于 0.7 的会被设置成 -1, 代表 ignore, Anchors that has IOU in
range(ignore_iou_thresh, pos_iou_thresh)don't get penalized of objectness score, ignore 表示这个 anchor 不会被受惩罚
整理一下, 输出:
- objness_t 是 (B, N, 1) 的 mx.ndarray, N = H_1 x W_1 x num_anchors + ... + H_3 x W_3 x num_anchors, 大于 ignore_iou_thresh 的为 -1, 其余全为 0
- center_t 是一个 (B, N, 2) 的 全零 mx.ndarray, N = H_1 x W_1 x num_anchors + ... + H_3 x W_3 x num_anchors
- scale_t 是一个 (B, N, 2) 的 全零 mx.ndarray, N = H_1 x W_1 x num_anchors + ... + H_3 x W_3 x num_anchors
- weight_t 是一个 (B, N, 2) 的 全零 mx.ndarray, N = H_1 x W_1 x num_anchors + ... + H_3 x W_3 x num_anchors
- class_t 是一个 (B, N, num_class) 的 mx.ndarray, 数值全部都是 -1, N = H_1 x W_1 x num_anchors + ... + H_3 x W_3 x num_anchors
写的太好了,看着你的系列才看明白gluoncv的yolo