Created
January 23, 2018 04:12
-
-
Save ahwillia/9e7adbc7f128a2b6699a1f4cfe5cc11f to your computer and use it in GitHub Desktop.
tsp_2opt.py
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| def reverse_segment(path, n1, n2): | |
| """Reverse the nodes between n1 and n2. | |
| """ | |
| q = path.copy() | |
| if n2 > n1: | |
| q[n1:(n2+1)] = path[n1:(n2+1)][::-1] | |
| return q | |
| else: | |
| seg = np.hstack((path[n1:], path[:(n2+1)]))[::-1] | |
| brk = len(q) - n1 | |
| q[n1:] = seg[:brk] | |
| q[:(n2+1)] = seg[brk:] | |
| return q | |
| def solve_tsp(dist): | |
| """Solve travelling salesperson problem (TSP) by two-opt swapping. | |
| Params | |
| ------ | |
| dist (ndarray) : distance matrix | |
| Returns | |
| ------- | |
| path (ndarray) : permutation of nodes in graph (rows of dist matrix) | |
| """ | |
| # number of nodes | |
| N = dist.shape[0] | |
| # tsp path for quick calculation of cost | |
| ii = np.arange(N) | |
| jj = np.hstack((np.arange(1, N), 0)) | |
| # for each node, a sorted list of closest nodes | |
| dsort = [np.argsort(d) for d in dist] | |
| dsort = [d[d != i] for i, d in enumerate(dsort)] | |
| # randomly initialize path through graph | |
| path = np.random.permutation(N) | |
| idx = np.argsort(path) | |
| cost = np.sum(dist[path[ii], path[jj]]) | |
| # keep track of objective function over time | |
| cost_hist = [cost] | |
| # optimization loop | |
| node = 0 | |
| while node < N: | |
| # we'll try breaking the connection i -> j | |
| i = path[node] | |
| j = path[(node+1) % N] | |
| # since we are breaking i -> j we can remove the cost of that connection | |
| c = cost - dist[i, j] | |
| # search over nodes k that are closer to j than i | |
| for k in dsort[j]: | |
| # can safely continue if dist[i,j] < dist[k,j] for the remaining k | |
| if k == i: | |
| node += 1 | |
| break | |
| # break connection k -> p | |
| # add connection j -> p | |
| # add connection i -> k | |
| p = path[(idx[k]+1) % N] | |
| new_cost = c - dist[k,p] + dist[j,p] + dist[i,k] | |
| # if this swap improves the cost, implement it and move to next i | |
| if new_cost < cost: | |
| path = reverse_segment(path, idx[j], idx[k]) | |
| idx = np.argsort(path) | |
| # make sure that we didn't screw up | |
| assert np.abs(np.sum(dist[path[ii], path[jj]]) - new_cost) < 1e-6 | |
| cost = new_cost | |
| # restart from the begining of the graph | |
| cost_hist.append(cost) | |
| node = 0 | |
| break | |
| return path, cost_hist | |
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
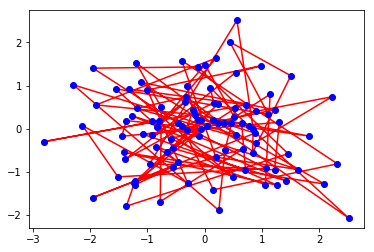
Before:
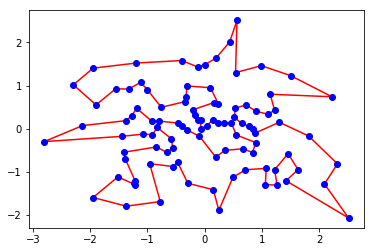
After: