
| // web* src: https://gist.github.com/andrew-raphael-lukasik/dcf4d308f96852b790f49efb87e462dd | |
| using UnityEngine; | |
| using Unity.Mathematics; | |
| public class CapsuleCapsuleIntersection : MonoBehaviour | |
| { | |
| [SerializeField] CapsuleCollider _capsuleA, _capsuleB; | |
| void OnDrawGizmos () | |
| { | |
| if( _capsuleA==null || _capsuleB==null ) return; | |
| // calculate all the points: | |
| ToWorldSpaceCapsule( _capsuleA , out float3 A0 , out float3 A1 , out float Ar ); | |
| ToWorldSpaceCapsule( _capsuleB , out float3 B0 , out float3 B1 , out float Br ); | |
| SegmentSegmentCPA( A0 , A1 , B0 , B1 , out float3 C0 , out float3 C1 , out bool parallel ); | |
| // draw debug shapes: | |
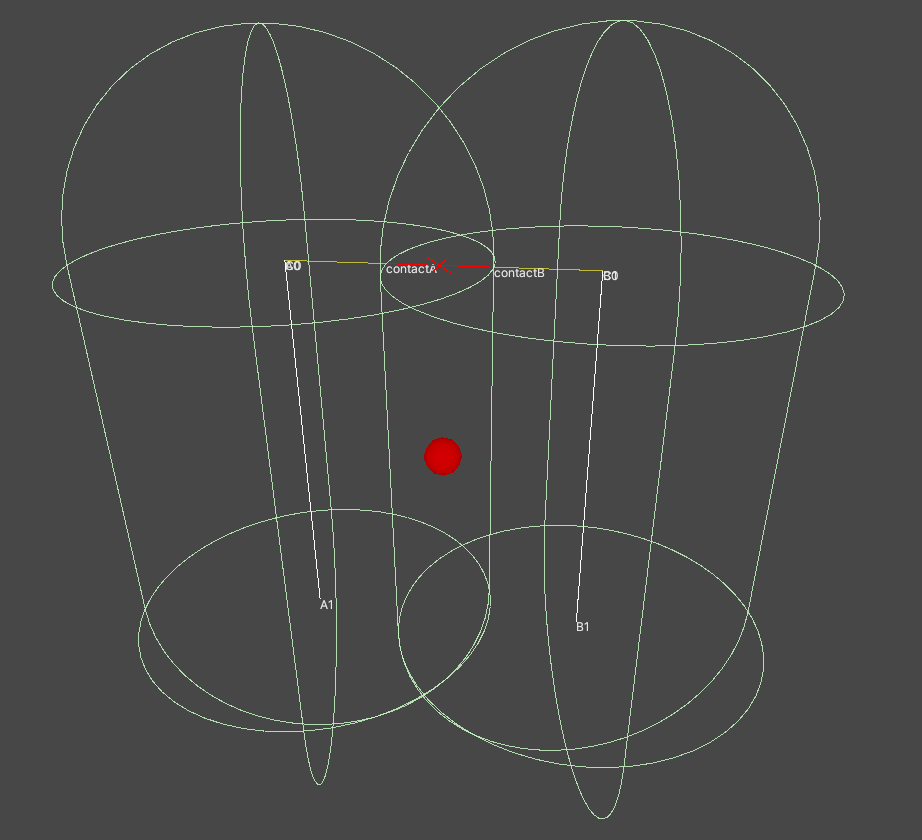
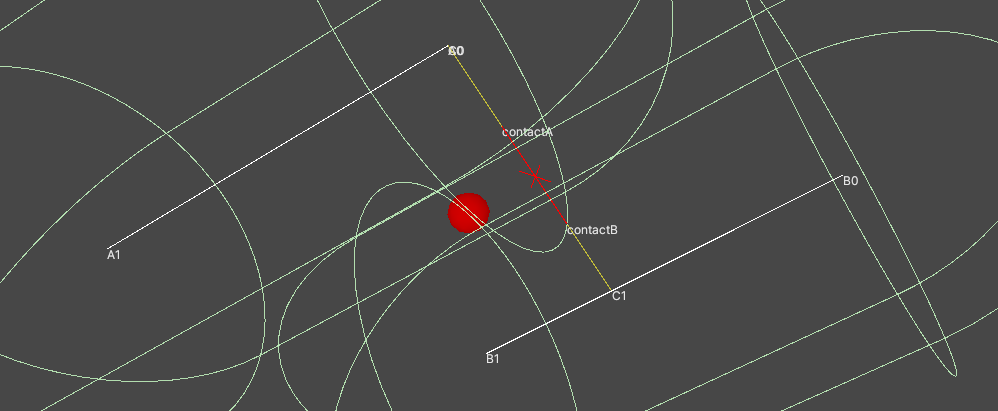
| Gizmos.DrawLine( A0 , A1 ); | |
| Gizmos.DrawLine( B0 , B1 ); | |
| Gizmos.color = new Color( 1 , 0.92f , 0.016f , 0.5f ); | |
| Gizmos.DrawLine( C0 , C1 ); | |
| UnityEditor.Handles.Label( A0 , nameof(A0) ); | |
| UnityEditor.Handles.Label( A1 , nameof(A1) ); | |
| UnityEditor.Handles.Label( B0 , nameof(B0) ); | |
| UnityEditor.Handles.Label( B1 , nameof(B1) ); | |
| UnityEditor.Handles.Label( C0 , nameof(C0) ); | |
| UnityEditor.Handles.Label( C1 , nameof(C1) ); | |
| // calculate contact details: | |
| float3 axis = math.normalize( C1 - C0 ); | |
| float distance = math.length( C1 - C0 ); | |
| bool contact = distance <= Ar+Br; | |
| if( contact ) | |
| { | |
| float3 contactA = C1-axis*math.min(Br,distance); | |
| float3 contactB = C0+axis*math.min(Ar,distance); | |
| float3 contactCenter = math.lerp( contactA , contactB , 0.5f ); | |
| float contactLength = math.length( contactB - contactA ); | |
| // draw debug shapes: | |
| UnityEditor.Handles.Label( contactA , nameof(contactA) ); | |
| UnityEditor.Handles.Label( contactB , nameof(contactB) ); | |
| Gizmos.color = Color.red; | |
| Gizmos.DrawLine( contactA , contactB ); | |
| float debugContactLen = math.min(Ar,Br)*0.1f; | |
| quaternion quat = quaternion.LookRotation( axis , new float3{y=1} ); | |
| Gizmos.DrawLine( | |
| contactCenter + math.mul(quat,new float3(-debugContactLen,-debugContactLen,-debugContactLen)*0.5f) , | |
| contactCenter + math.mul(quat,new float3(debugContactLen,debugContactLen,debugContactLen)*0.5f) | |
| ); | |
| Gizmos.DrawLine( | |
| contactCenter + math.mul(quat,new float3(-debugContactLen,-debugContactLen,debugContactLen)*0.5f) , | |
| contactCenter + math.mul(quat,new float3(debugContactLen,debugContactLen,-debugContactLen)*0.5f) | |
| ); | |
| if( parallel ) | |
| { | |
| // calculate average contact center: | |
| var aabb = new Bounds{ center=A0 }; | |
| aabb.Encapsulate( A1 ); | |
| aabb.Encapsulate( B0 ); | |
| aabb.Encapsulate( B1 ); | |
| float3 averageContactCenter = aabb.center; | |
| // draw debug shapes: | |
| Gizmos.DrawSphere( averageContactCenter , debugContactLen ); | |
| // Gizmos.DrawWireCube( aabb.center , aabb.size ); | |
| } | |
| } | |
| } | |
| // src: https://stackoverflow.com/a/67102941/2528943 | |
| void SegmentSegmentCPA | |
| ( | |
| float3 a0 , float3 a1 , float3 b0 , float3 b1 , | |
| out float3 c0 , out float3 c1 , out bool parallel | |
| ) | |
| { | |
| var r = b0 - a0; | |
| var u = a1 - a0; | |
| var v = b1 - b0; | |
| var ru = math.dot(r,u); | |
| var rv = math.dot(r,v); | |
| var uu = math.dot(u,u); | |
| var uv = math.dot(u,v); | |
| var vv = math.dot(v,v); | |
| var det = uu*vv - uv*uv; | |
| float3 s, t; | |
| if( det<(1e-6f*uu*vv) ) | |
| { | |
| s = math.clamp(ru/uu, 0, 1); | |
| t = 0; | |
| parallel = true; | |
| } | |
| else | |
| { | |
| s = math.clamp((ru*vv - rv*uv)/det, 0, 1); | |
| t = math.clamp((ru*uv - rv*uu)/det, 0, 1); | |
| parallel = false; | |
| } | |
| var S = math.clamp((t*uv + ru)/uu, 0, 1); | |
| var T = math.clamp((s*uv - rv)/vv, 0, 1); | |
| c0 = a0 + S*u; | |
| c1 = b0 + T*v; | |
| } | |
| // src: https://github.com/justonia/UnityExtensions/blob/219168f1f52012eaf625996abc193524c78ba9ca/PhysicsExtensions.cs//L209-L241 | |
| void ToWorldSpaceCapsule ( CapsuleCollider capsule , out float3 start , out float3 end , out float r ) | |
| { | |
| float3 center = capsule.transform.TransformPoint( capsule.center ); | |
| r = 0f; | |
| float height = 0f; | |
| float3 lossyScale = math.abs( capsule.transform.lossyScale ); | |
| float3 dir = float3.zero; | |
| switch( capsule.direction ) { | |
| case 0:// x | |
| r = math.max( lossyScale.y , lossyScale.z ) * capsule.radius; | |
| height = lossyScale.x * capsule.height; | |
| dir = capsule.transform.TransformDirection(Vector3.right); | |
| break; | |
| case 1:// y | |
| r = math.max( lossyScale.x , lossyScale.z ) * capsule.radius; | |
| height = lossyScale.y * capsule.height; | |
| dir = capsule.transform.TransformDirection(Vector3.up); | |
| break; | |
| case 2:// z | |
| r = math.max( lossyScale.x , lossyScale.y ) * capsule.radius; | |
| height = lossyScale.z * capsule.height; | |
| dir = capsule.transform.TransformDirection(Vector3.forward); | |
| break; | |
| } | |
| if( height<r*2f ) | |
| dir = float3.zero; | |
| start = center + dir*( height*0.5f - r ); | |
| end = center - dir*( height*0.5f - r ); | |
| } | |
| } |