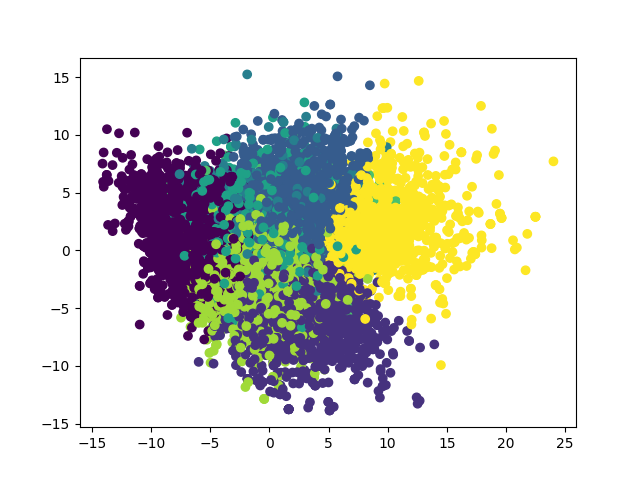
(ASRS reports from Jan 2020 - Jan 2023)
Cluster 0 (reported by controllers?)
- Center Controller reported descending an aircraft into another Controller's airspace; thinking the D-Side had pointed the aircraft out.
- Tower Controller reported an airborne conflict resulting in an aircraft having to execute a go-around. Controller cited staffing and traffic volume as a contributing factors.
- TRACON Controller reported an unsafe operation between an IFR carrier and a VFR aircraft resulting in an airborne conflict.