- ADT Interfaces:
- Opaque view of a data structure (eg.
typedef struct t *T, we don't knowstruct t) - Function signatures for all operations
- Semantics of operations (via documentation, etc)
- A contract between ADT and clients
- Opaque view of a data structure (eg.
- ADT implementations
- Concrete defintion of the data structures
- Function implementations for all operations
-
A sequence of collection of 'nodes' holding value + pointer(s)
-
No random access
-
Easy to add, rearrange, remove nodes...
-
List nodes references other list nodes:
- Singly Linked List:
next - Doubly Linked List:
nextprev
- Singly Linked List:
-
Operations
- Insertion ~ O(N)
- Deletion ~ O(N)
- Search ~ O(N)
- Intersection ~ O(N+M)
-
LIFO (Last In First Out) data structure
-
List implementation:
- Push: Append node to head of the list ~ O(1)
- Pop: Remove and return head ~ O(1)
struct stack { struct node *head; struct node *tail; size_t size; }; struct node { Item item; struct node *next; }
-
Array Implementation
- Allocate an array with a maximum number of elements
- Fill items sequentially
- Maintain a counter of the number of pushed / popped items (ie. the top)
- Push: Increment top and set new top array index to value ~ O(1)
- Pop: Decrement top and return the last hightest value
- Disadvantage: Fixed size stack (Unless it's a dyanamically growing array)
struct stack { int top; Item *items; };
- FIFO (First In First Out) data structure
- List Implementation
struct queue {
struct node *head;
struct node *tail;
}
struct node {
Item item;
struct node *next;
}- Insert: O(N) - without tail pointer in struct, otherwise O(1)
- Deletion: O(1)
-
Emperical: executing and measuring
-
Theoretical: proving and deriving
-
Factors:
- Correctness: returns expected output
- Robustness: behaves sensibly for non-valid inputs
- Efficiency: returns results reasonably quickly
- Clarity: clear code
- Consistency: interface is clear & consistent
-
We will only focus on correctness and efficiency.
-
Postel's Robustness Principle: "Be conservative in what you do; be liberal in what you accept from others"
-
TDD (Test Driven Development): write tests first, then write the function & repeat
-
Regression testing: Keep a test suite and always run the tests after each update to the program
-
Black-box testing: checks behaviour using only the interface (ie the ADT interface)
-
White-box testing: checks internal behaviour (when we can see and test the ADT implementation)
-
Algorithm runtime tends to be a function of input size
-
Focus on asymptotic worst-case execution time
-
Take into account all possible input ranges
-
Cases: Best Case / Average Case / Worst Case
-
Binary search example:
- start at middle for sorted list
- is the middle the key? if not continue
- if item is less, we search in left range (lo, mid)
- otherwise, we search in right range (mid+1, hi)
- start at middle for sorted list
-
Best case: O(1) ~ middle value
-
Worst case:
- t(N) = 1 + t(N/2) = log(N) + 1
- ~ O(log n)
-
Complexity Classes
- O(1) - Constant - Constant time execution, independant of input size.
- O(log n) - Logarithmic - Some divide-and-conquer algorithms with trivial split/recombine operations.
- O(n) - Linear - Every element of the input has to be processed
- O(n log n) - n-log-n - Divide and conquer algorithms, where split / recombine is proportional to input
- O(n^2) - Quadratic - Compute every input with every other input
- O(n^3) - Cubic - misery
- O(n!) - Factorial - what the...
- O(2^n) - Exponential - nope
-
O(1) < O(log n) < O(n) < O(n log n) < O (n^2) < O(n^3) < O (n!) < O(2^n)
-
N^2 Algo ie. when N=1000 takes 1.2seconds, how long for
- N=2000 x2 -> x4 4.8 seconds
- N=10,000 x10 -> x100 120 seconds
- N=100,000 x100 -> x10000 12000 seconds
- N=1000000 x1000 -> x1000000 1200000 seconds
-
Apply ^2 to how much times number of items increases. Multiply that number with base case.
-
Tractable: have a polynomial time ('P') algorithm
-
Intractable: no tractable algorithm exists (usually 'NP')
-
Non-computable: no algorithm exists
- Base case (or stopping case): where no recursive call is needed
- Recursive case: calls the function on a smaller version of the problem.
- Steps:
- Solve as if you're not using recursion for basic subset of problem
- Use self for solving the rest
- eg. n! = (n-1)! x n
- f(0)=1 f(1) = 1 else f(n) = n*f(n-1)
- Usually iterative and recusrive has same time complexity (ie. arry_max, binary_search)
- Trees are branches data structures of nodes and edges with no cycles.
- Each node contains a value
- Each node has edges <=k other nodes (k = 2 for binary trees)
- Node is parent if it has outgoing edges
- Node is child if it has incoming edges
- Depth (or height) is the number of edges from the root to that node;
- A leaf is a node with no children.
- Trees can be viewed as set of nested structures
- Values in the left subtree has to be less than the node value
- Vice versa for right subtree.
- Degenerate: maximal height (n-1)
- Balanced: minimal height (log n)
- Size: |size(L) - size(R)| < 2
- Height: |height(L) - height(R)| < 2
- Advantages
- Faster search O(log n) - compared with linked lists
- Faster inseartion O(log n) - compared with array O(N)
- A binary tree with n nodes has a height of at most n-1, if degenerate or least floor(log n) if balanced
- Complete binary tree have hieght ceiling(log n).
- Insertion: balanced ~ O(log n), degenerate ~ O(n) ie. have to traverse the tree, like a llist
- Search / Deletion: balanced ~ O(log n), degenerate O(n)
- All nodes in left are less than and vice versa
- Structure determined by order of insertion
- Depth First:
- Pre-order traversal (NLR)
- In-order traversal (LNR) - visits elements in sorted order - when tree is a BST.
- Post-order traversal (LRN)
- Breath First:
- Level-order traversal: visit node and all its children
- ie. Like a BFS, where you use a queue
- basically visits each level from left to right
- use a queue
void tree_level_order_traversal (Tree t) { if (!t) return; Queue q = newQueue(40); QueueJoin(q, t); while (!QueueIsEmpty(q)) { Item n = QueueLeave(q); printf("%d ", n->item); if (n->left) QueueJoin(q, n->left); if (n->right) QueueJoin(q, n->right); } dropQueue(q); }
- Level-order traversal: visit node and all its children
- Tree successors (In order)
- Case 1: node has right subtree
- Find the minimum (left most value) of the right sub tree
- Case 2: no right subtree
- Method 2: Perform an in order traversal, store in array and do a linear search for successor (very inefficient, but works)
- Case 1: node has right subtree
- Deleting a node
- Swap value with left most value from the right subtree (ie. it's successor)
- Delete the item
- Perform rotations (if required - ie. splay tree)
- Process in order of key or priority.
- Altered
enqueueanddequeueoperations Enqueue: join item with a priority.- FixUp operation has to be done, since we insert node at bottom.
Dequeue: remove item with highest priority Q.- FixDown operation has to be done, since we remove top node, by swapping with last item. Last item may not be ideal canditate for top root.
-
Commonly viewed as trees, implemented using arrays.
-
Two properties to maintain:
- heap order property
- complete tree property
-
Heaps have top-to-bottom ordering (whereas binary trees have left to right ordering)
-
Heaps are complete trees!
- Every level is filled before adding nodes to the next level
- Nodes in given level are filled left-to-right with ni breaks
-
Arrays are good for heaps
- parent(i) = i/2
- left_child(i) = 2i
- right_child(i) = 2i+1
-
Inserting:
- Add new element at the bottom-most, right-most position (to ensure complete tree property)
- Reorganise values along the path to the root (to ensure it maintains heap order)
- We call this the heap fixup operation
- O(log n)
-
Deleting is a three-step process:
- Swap root value with bottom-most, right-most value (ie. last element of array)
- Remove that element
- Reorganise values along the path from root (to ensure it maintains heap order)
- We call this the heap fix down operation
- O(log n)
-
Models relationship between items
-
A graph G is a set of vertices V and edges E
- E := {(v,w) | v,w is an element of V, (v,w) is an element of V X V}
- Basically a set of edges [(v,w)]
-
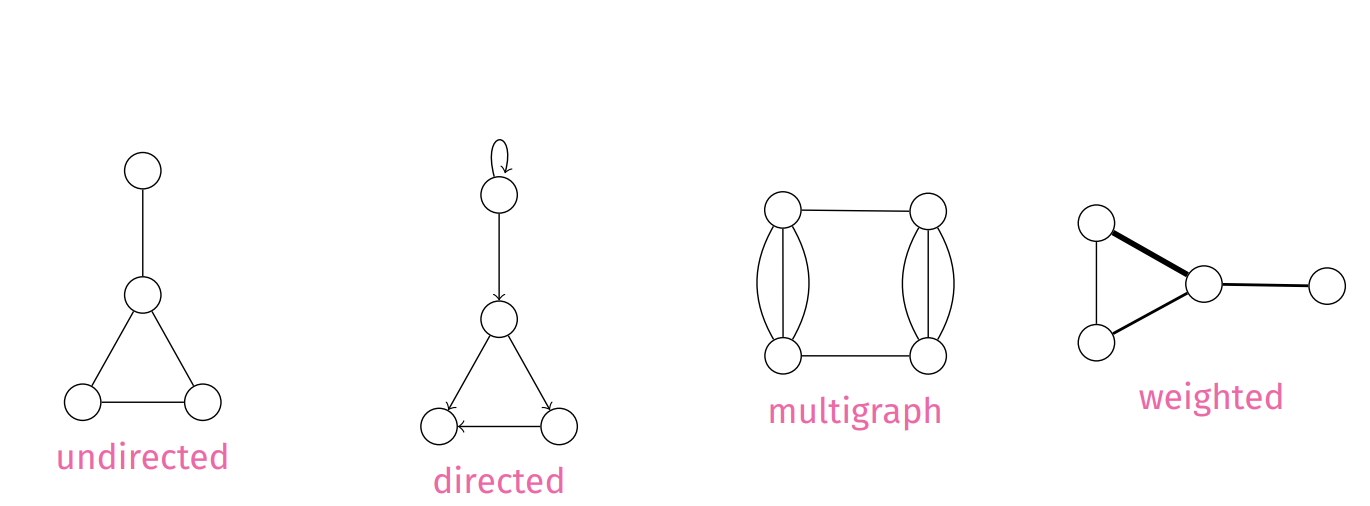
Simple graphs
- a set of vertices
- a set of undirected edges
- no self loops
- no parallel edges
-
Sparcity vs Density
- Sparcity ~ less connections between nodes
- |E| approaches |V|
- Density ~ more connections between nodes
- |E| approaches |V|^2
- Sparcity ~ less connections between nodes
-
Subgraph: subset of vertices and associate edges
-
Path: Sequence of connected vertices ie [(v,e) elem 1]
-
Simple path: no repeating vertices
-
Cycle: path with start and end vertex as the same.
-
How to find:
- Perform a DFS.
- Whilst performing a DFS, if visiting already visited node, then it has a cycle.
-
-
Connected graph: a path exists from every node to every other node
-
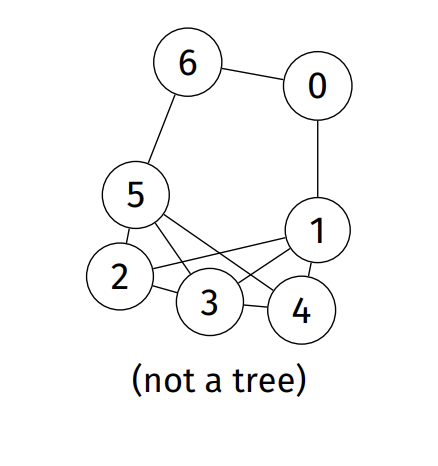
Tree: connected graph with no cycles
-
Connected components: a graph that's not connected, consisting of a set of connected components.
- ie. maximally connected subgraphs
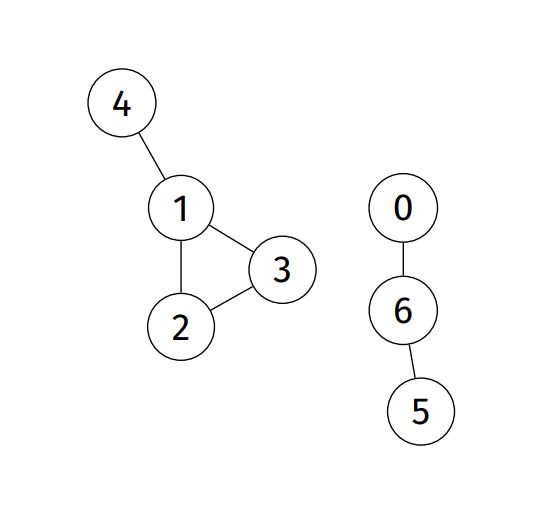
- ie. maximally connected subgraphs
-
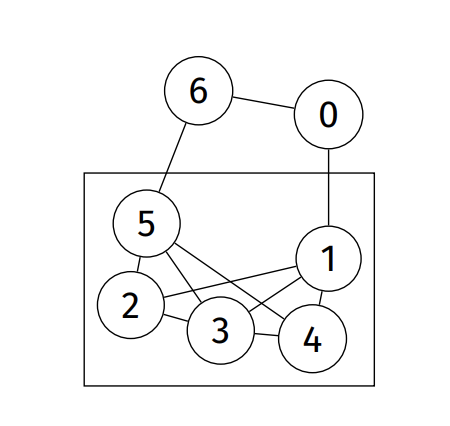
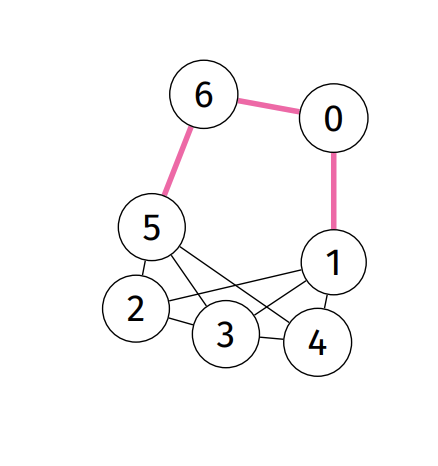
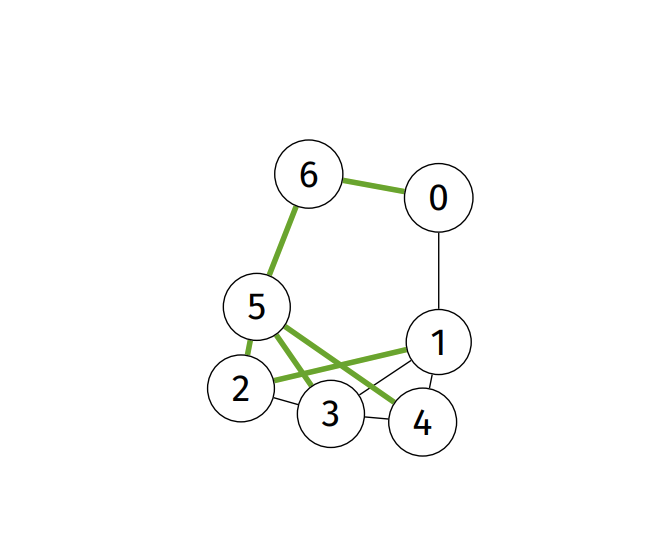
Spanning tree: (of graph) subgraph that connects all its verteces
-
Minimum spanning tree: spanning tree that has the least total weight
-
Spanning forest: (of graph) subgraph that contains all its vertices and is a set of ›trees
-
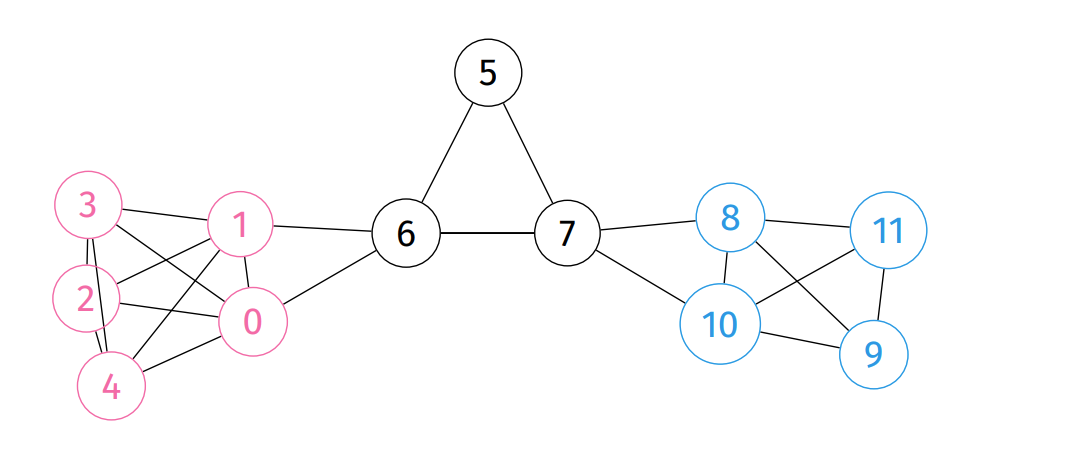
Clique: complete subgraph
- Adjacency Matrix: |V| X |V| matrix; each cell represents an edge
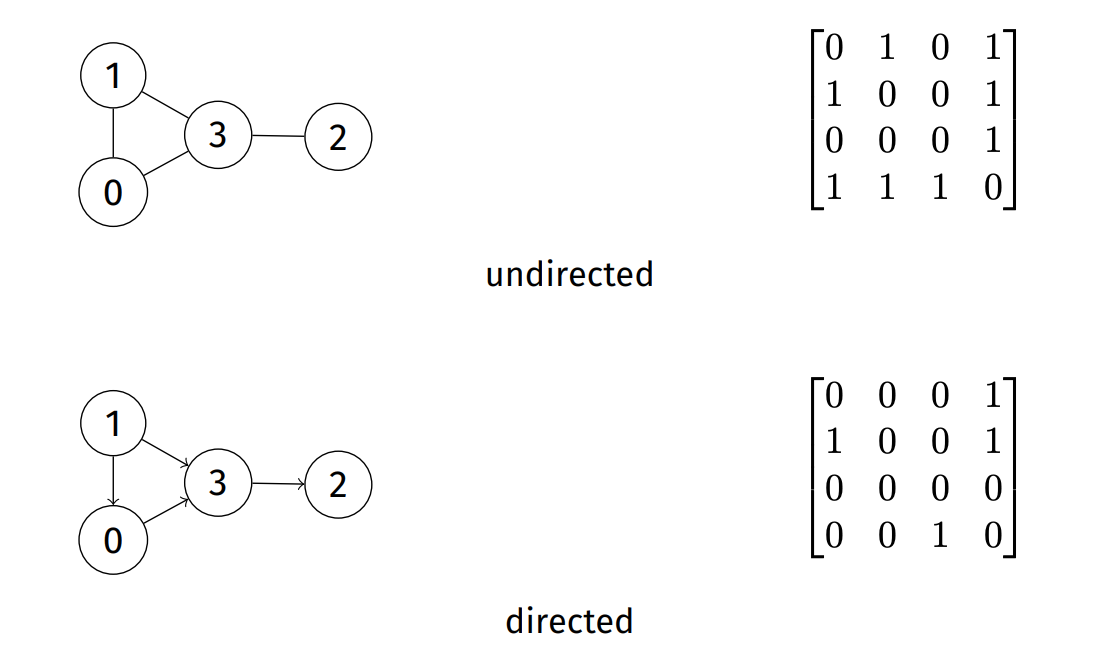
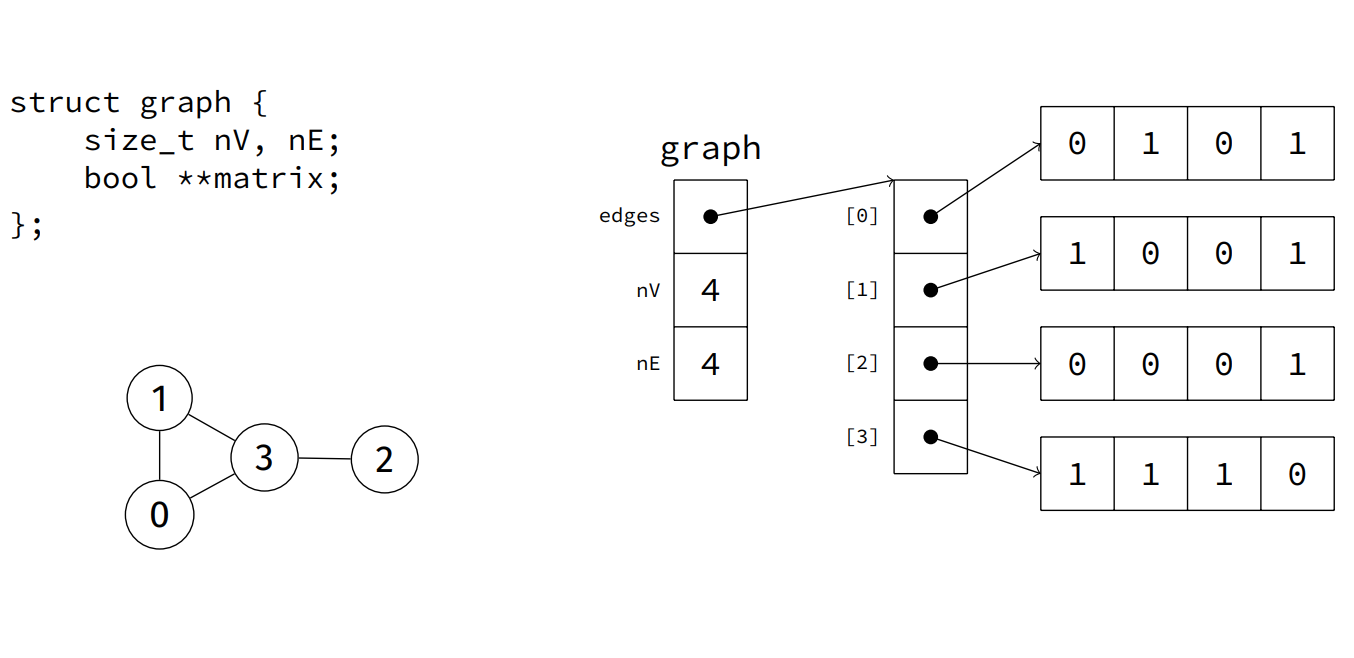
- Advantages:
- Easy to implement
- Words for graph, digraphs, weighted fraphs, multigraphs
- Time efficient
- Disadvantage
- Huge space: V^2
- Sparce graphs ~> wasted space!
- undirected graph ~> wasted space!
- Inefficent initialiseation / vertex- insert/delete
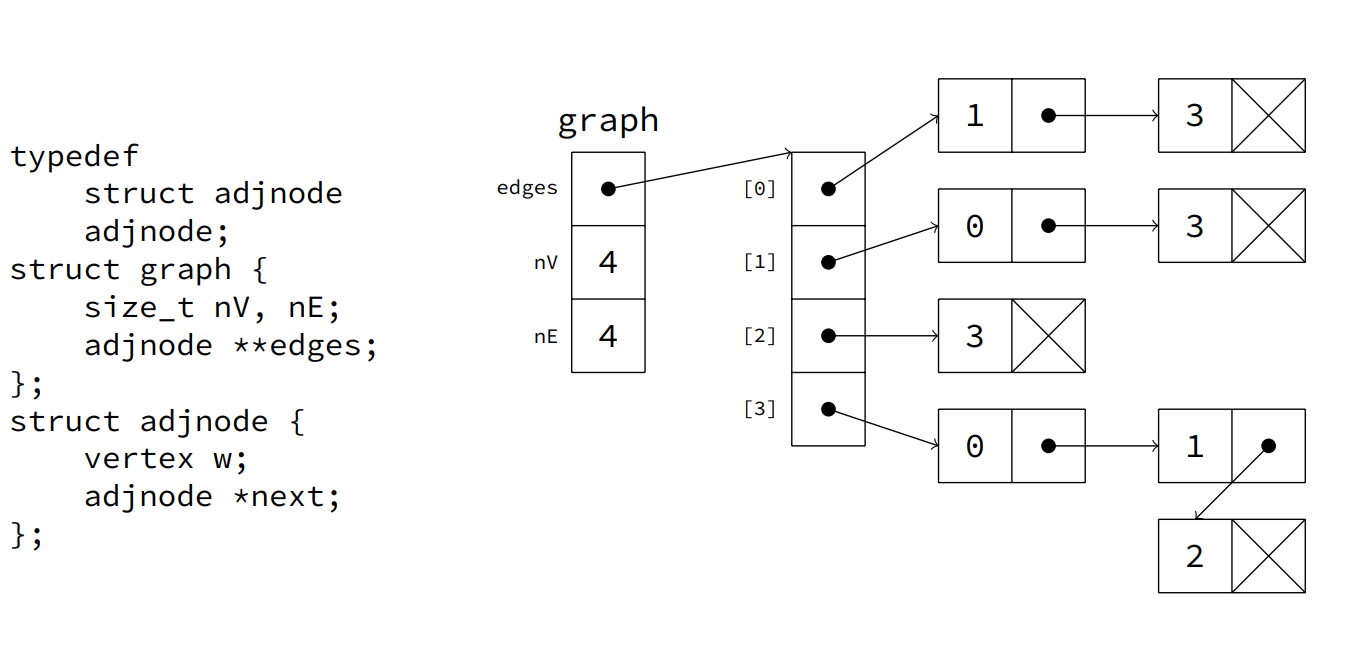
- Adjacency List
| Operation | Matrix | List |
|---|---|---|
| Space | V^2 | V + E |
| Initialise | O(V^2) | O(V) |
| Destroy | O(V) | O(E) |
| Insert Edge | O(1) | O(V) |
| Find / Remove Edge | O(1) | O(V) |
| Is Isolated | O(V) | O(1) |
| Degree | O(V) | O(E) |
| Is Adjaceny | O(1) | O(V) |
- Graph ADT
typedef struct graph *Graph;
/** A concrete edge type. */
typedef struct edge { vertex v, w; weight n; } edge;
/** Create a new instance of a Graph. */
Graph graph_new (
size_t max_edges, /**< maximum value hint */
size_t max_vertices, /**< maximum value hint */
bool directed, /**< true if a digraph */
bool weighted /**< true if edges have weight */
);
/** Deallocate resources used by a Graph. */
void graph_drop (Graph g);-
Problem: Does a path exist between vertex v and w?
-
Generic Solution
- Examine vertices adjacent to
v; - if any of them is
w, we're done - otherwise, check all the adjacent vertices and repeat util we reach
w
- Examine vertices adjacent to
-
Simple pattern:
- Create a structure that will tell us what node to visit next.
- Add the starting node to that structure
- While that structure is not empty
- Get the next vertex from that structure
- Mark that node as visited (if it isn't visited)
- Add Neighbours to the structure
-
Depth First Search (DFS): Longest paths first ~ uses a
Stack- Keep track of
count: number of verticies traversed so farpre: order in which vertices were visitedst: predecessor of each vertex (for spanning tree)
- Edges traversed in all graph walks form a
spanning tree, which has- edges corresponding to call-tree of recursive function
- is the original graph sans cycles / alternate graph
- in general, spanning tree has all vertices and a minimal set of edges to produce a connected graph (ie. no loops, cycles, parallel edges)
- If a graph is not connected,
DFSwill produce a spanning forest - An edge connecting a vertex with an ancestor in the DFS tree that is not its parent is a
back edge
- Keep track of
-
Breath First Search (BFS): Adjacent nodes first ~ uses a
Queue -
Dikstra: Lowest-cost paths first
- v -> w
- eg. follow on twitter / instagram
- In a digraph, edges have direction, self-loops are allowed, parallel edges are allowed
- in-degree: number of directed edges leading into a vertex
- source: a vertex with a in-degree 0;
- out-degree: number of directed edges leading out of a vertex
- sink: a vertex with out-degree 0;
- reachability: indicates existence of directed graph
- if a direct path
v,...wexists wis reachable fromv.
- if a direct path
- strongly connected:
- if both paths
v,...,wandw,...,vexist thenvandware strongly connected
- if both paths
- strongly connected: indicates mutual reachability
- if both paths
v,...,wandw,...,vexist vandware strongly connected
- if both paths
- strong connectivity: every vertex reachable from every other vertex
- strongly-connected component: maximal strongly-connected subgraph
- Representations
- Adjacency matrix ... Asymmetrix, sparese, less space efficent
- Adjaceny List... Fairly common
- Edge lists... Order of edge components matters
- Linked data structures.. pointers inherently directional
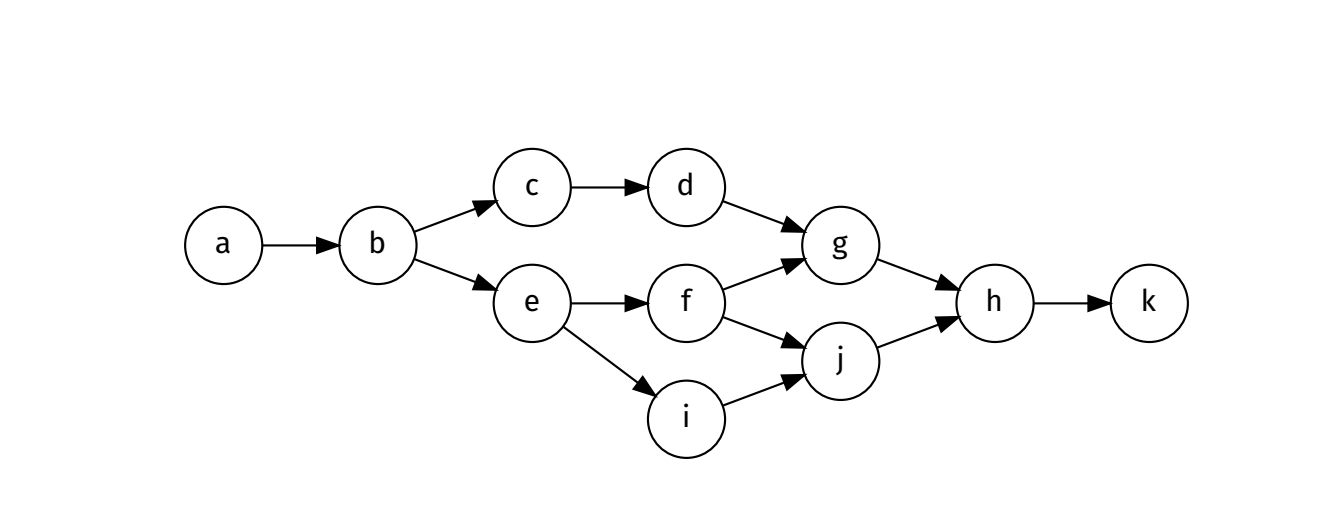
- DAGs: Directed Acyclic Graph
- Tree like where each vertex has children
- Graph like where child vertex may have multiple parents
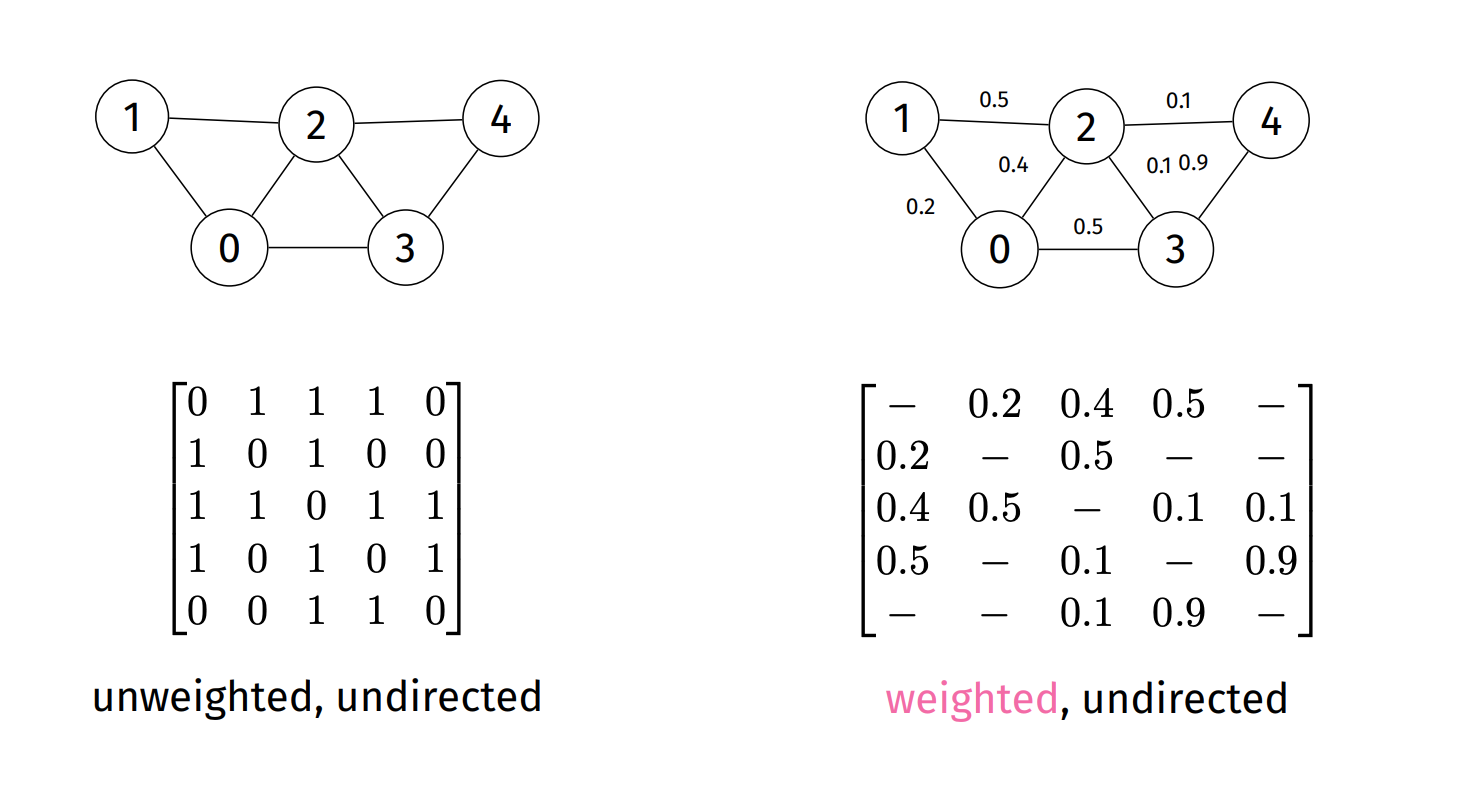
- Sometimes we need to assign a cost to a relationship between nodes (ie. distances between two map locations)
- We use geometric interpretation
- low weight -> short edge
- high weight -> high edge
- Sometimes weights can be negative
- Representations
- Adj Matrix: store weight in each cell (not just bool)
- Adj List: Add weight attribute to each list node
- Edge List: Add weight to each edge
- Linked data structure: links become link/weight pairs
- Adj Matrix: store weight in each cell (not just bool)
- Shortest path problem:
- Find the minimum cost path between two vertices
- Edges may be directed or undirected
- Assuming non-negative weights
- Minimum Spanning Trees
- Find the weight-minimal set of edges that connects all vertices
- Multiple solutions may exist
- Assuming undirected, non-negative weighted graphs
- Shortest Path Search
- source-target: shortest path from
vtow - single-source: the shortest path from
vto all other verices - all-pairs: the shortest paths for all pairs of
v,w - Note: If no weights we use least hops
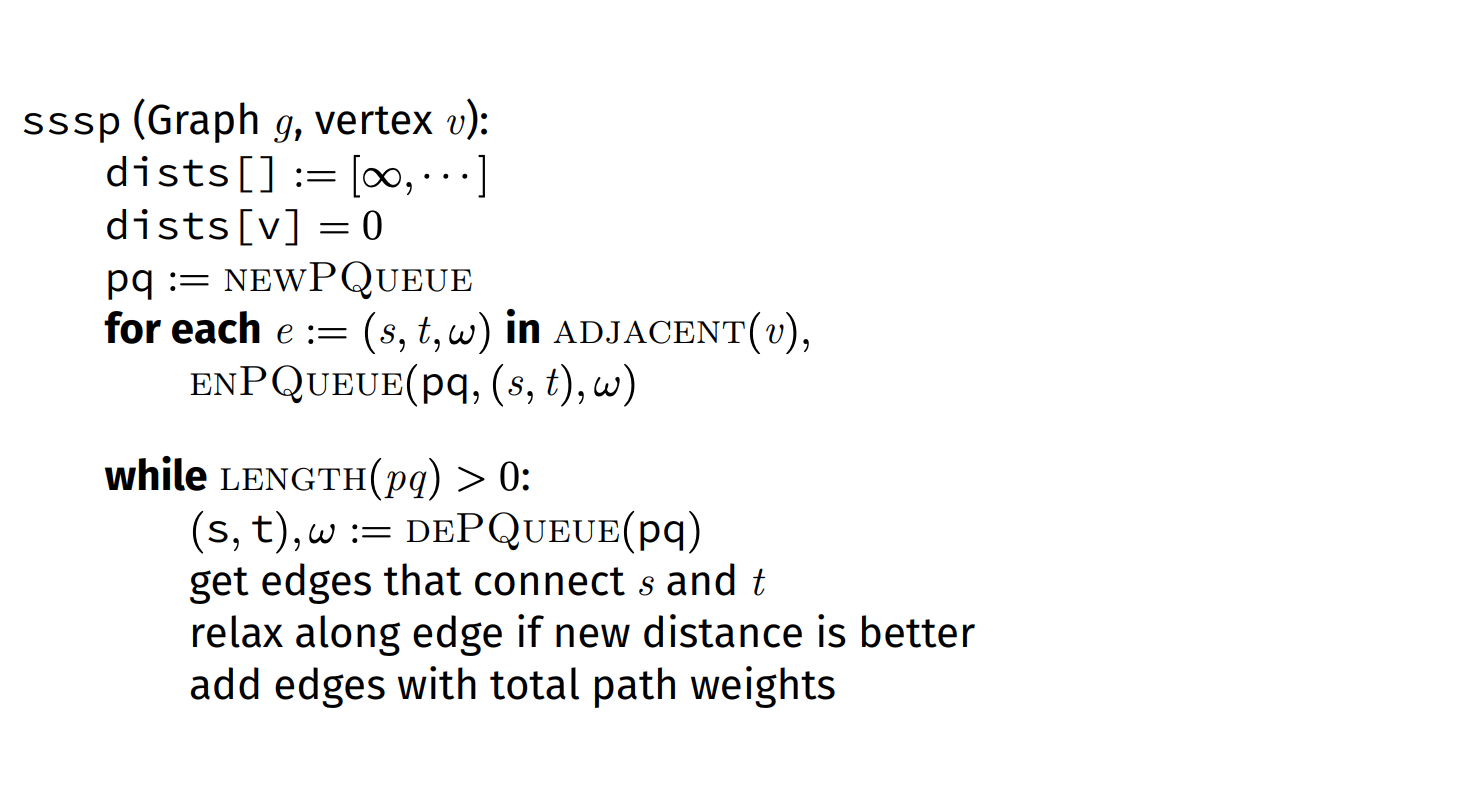
- Edge relaxation along edge
efromstot:dist[s]is length of some path fromvtosdist[t]is length of some path fromvtot- if
egives shorter pathvtotvias, updatedist[t]andst[t]. - basically update the distance and spanning tree if a shorter path has been found.
- Edge relaxation along edge
- Complexity:
- Using Adj List: O(E log V)
- Using Adj Matrix: O(V^2)
- Same as BFS/DFS but using a PQueue
- source-target: shortest path from
- Applications:
- Routing and network layout
- Economical construction of electric power network
- Kruskal: grow many forests
- Algo
- Take all edges and sort according to weight
- For each edge add to new graph, unless it introduces a cycle
- Algo
- Cycle checking is really expensive
- Sorting: O(E log E)
- Prim: Maintain a connectivity frontier
- Algo
- Start from any vertex s with an empty MST
- Choose edge not already in MST to add
- Must not contain a self-loop
- Must connect to a vertex already on MST
- Must have minimal weight of all such edges
- Check to see whether adding the new edge brought any of the non-tree vertices closer to the MST
- Repeat until MST has all vertices
- Easy Algo
- Start with any edge
- Choose edge with least weight
- Add to MST
- Check what edges connect to all visited nodes, with least weight (without visiting previously visited node)
- Add to MST
- GOTO (3. ~ ie. repeat until all vertices have been visited)
- O (E log V)
- Basically dijkstra's SSSP algorithm
- Algo
-
Hamilton Paths and Tours
- Hamilton path: path in graph that visits each vertex exactly once.
- Hamilton tour: hamiltonian path that's a cycle.
- BRUTE FORCE! enumerate every possible path, and check each one
- Hack a BFS or DFS to do it
- Keep a counter of vertices visited in current path
- Only accept a path if count is equal to the number of verticies
- Must inspect every possible path in graph = (V/e)^V
- NP problem (non-deterministic polynomial)
-
Euler Paths and Tours
- Euler path: path in graph that visits every edge exactly once. Starts and ends with different vertices.
- Exactly two verticies of odd degree
- Euler tour: path in graph that uses every edge of a exactly once. Starts and ends on same vertex.
- All verties of even degree
- Can be found in linear time
- Euler path: path in graph that visits every edge exactly once. Starts and ends with different vertices.
-
Tractable Problems
- Can we find a simple path connecting two vertices in a graph?
- What's the shortest path?
- Given two colors, can we colour every vertex in a graph such that no two adjacent vertices are the same colour?
- Is there a clique in a given graph?
-
Intractable Problems
- What's the longest path
- Given three colors, can we colour every vertex in a graph such that no two adjacent vertices are the same colour?
- What's the largest clique
-
Graph Isomorphism: Can we make two given graphs identical by renaming verticies?
- No general solution exists...
- Analysing sorting algorithms:
- N: number of items (hi + lo + 1)
- C: number of comparisons between items
- S: the number of times items are swappped
- Aim to minimise C and S
- Stable: Doesn't change relative order of elements with same key
- Inplace: Modifies original array
- Steps:
- Swap adjacent nodes if left > right
- Repeat the above
- best: O(n^2)
- worst: O(n^2)
- stable / in place
- Adaptive (Optional - early exit if sorted) ~ best: O(n)
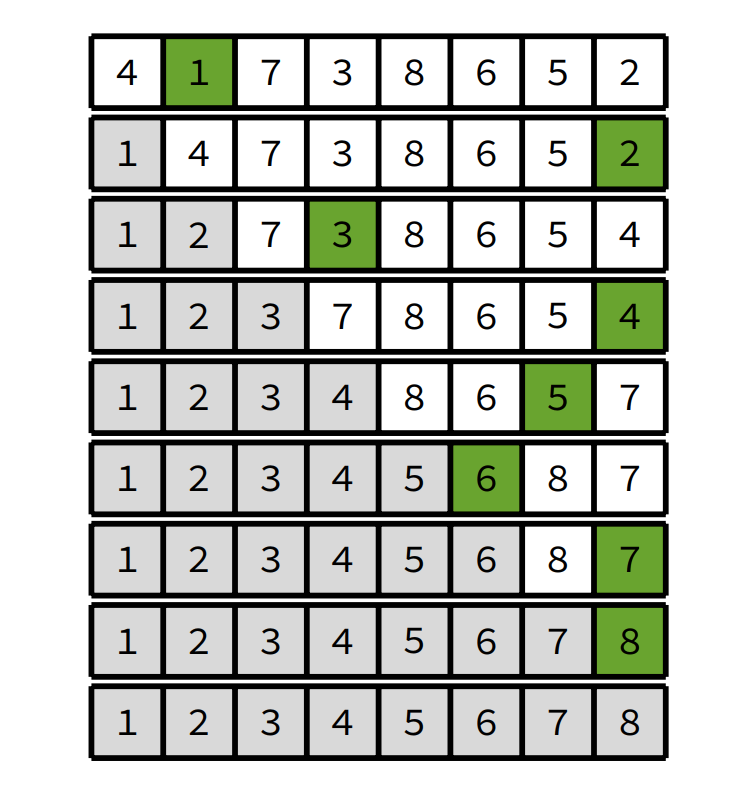
- Steps:
- Select the smallest element.
- Swap it with first position.
- Repeat above with first position increased and search boundry decreased.
- best: O(n^2)
- worst: O(n^2)
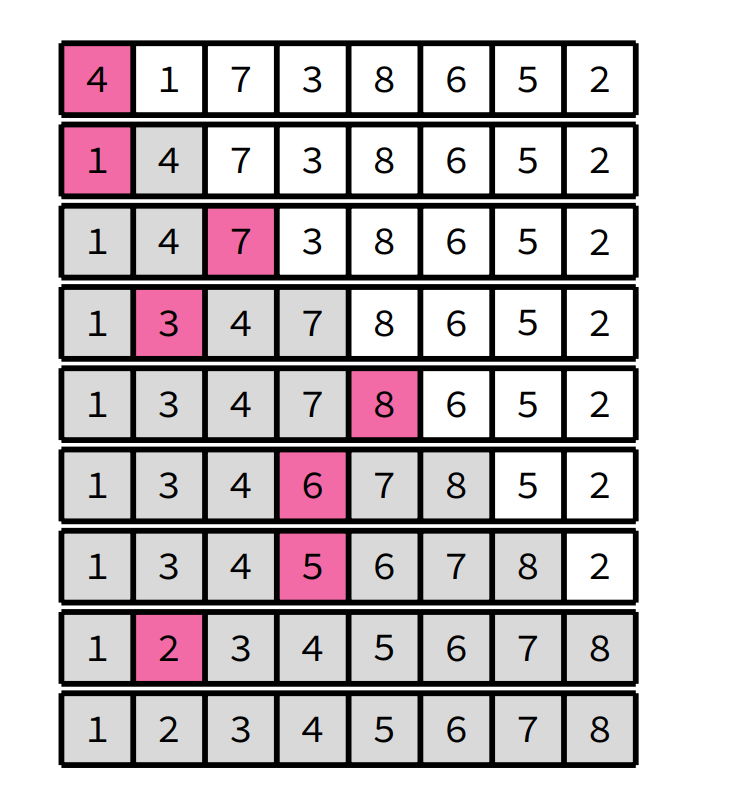
- Steps:
- Take the first element, insert into the first position.
- This is the start of our sorted sublist
- Take the next element, insert into the sorted sublist, in the right spot!
- Repeat until sorted!
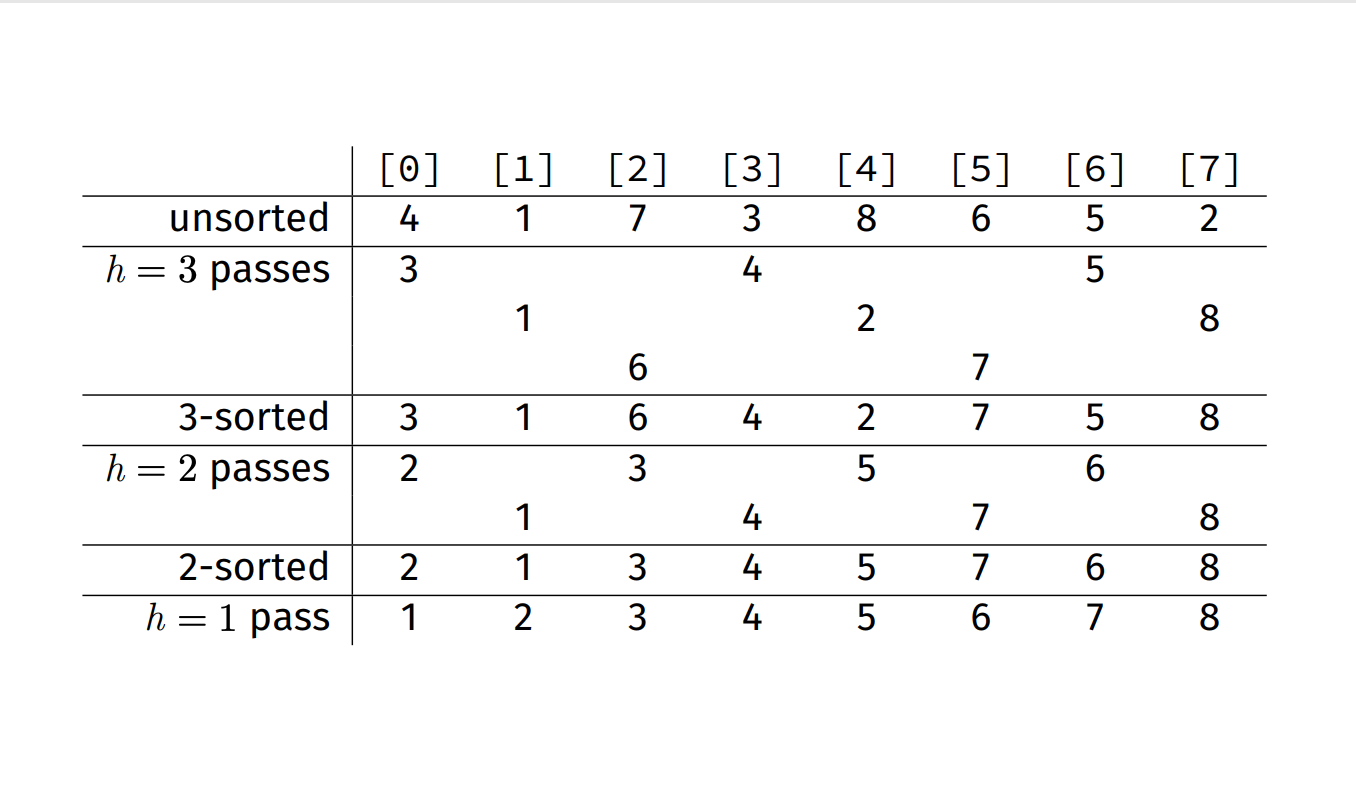
- Steps:
- Initialize the value of h (hilbert series)
- h = 1, h <= (n-1) / 9, h = (h*3) + 1
- ie. 1, 4, 13, 40...
- Divide the list into smaller sub-list of equal interval h
- Sort these sub-lists using insertion sort
- Repeat until complete list is sorted
- h=1 is an insertion sort
- Initialize the value of h (hilbert series)
- https://www.youtube.com/watch?v=j818Yud-ruc
-
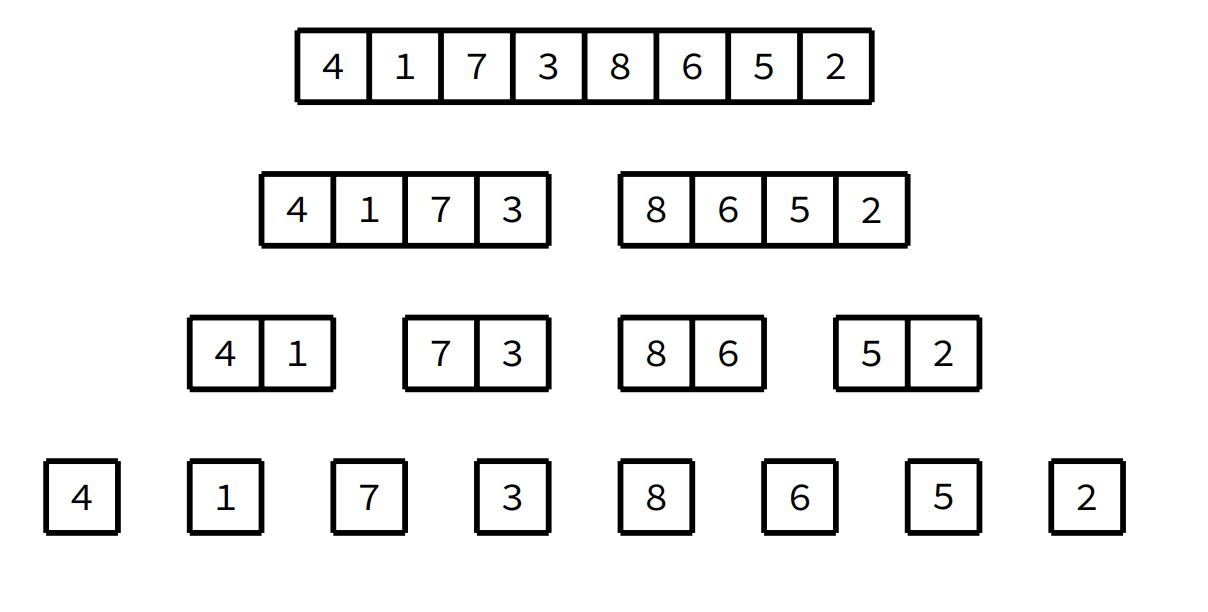
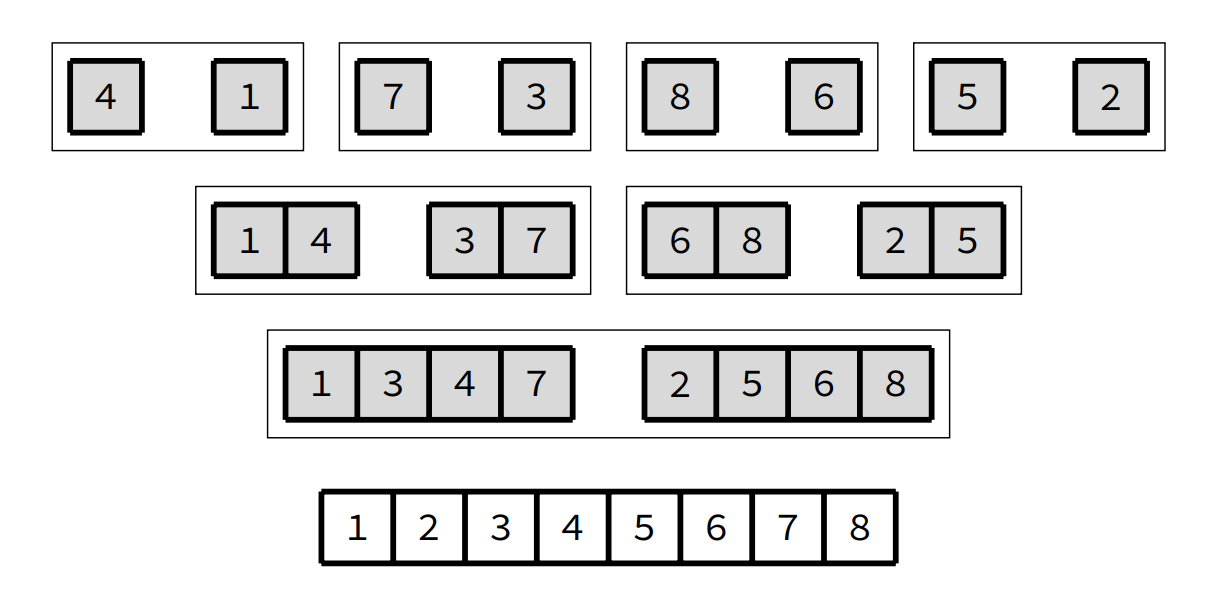
Divide and conquer
-
Steps:
- Partion the input into two equal size parts.
- Recursively sort each of the partitions.
- Merge the two sorted partitons back together.
-
Worst: O(n log n)
-
Merge sort uses a trivial split operation
-
Most of the work is done in the merge operation
- ie. end = MIN(i + 2*m - 1, hi)
- Divide and conquer
- Pivot
- Correct position in final, sorted array
- Items to left are smaller
- Items to right are larger
- Partition / Pivot Steps
- Choose the highest index value has pivot
- Take two variables to point left and right of the list excluding pivot
- left points to the low index
- right points to the high
- while value at left is less than pivot move right
- while value at right is greater than pivot move left
- if both step 5 and step 6 does not match swap left and right
- if left ≥ right, the point where they met is new pivot
- Quick sort steps
- Make the right-most index value pivot
- partition the array using pivot value
- quicksort left partition recursively
- quicksort right partition recursively
- Unstable
- Choosing a pivot:
- Something that divides the array in half (or as close as possible)
- M-O-3: use the middle value of array a[lo, mid, hi] as the pivot, where a[lo] <= a[mid] <= a[hi]
- O(log n) best case
- M-O-3 / random: O(n log n) worst & avg case
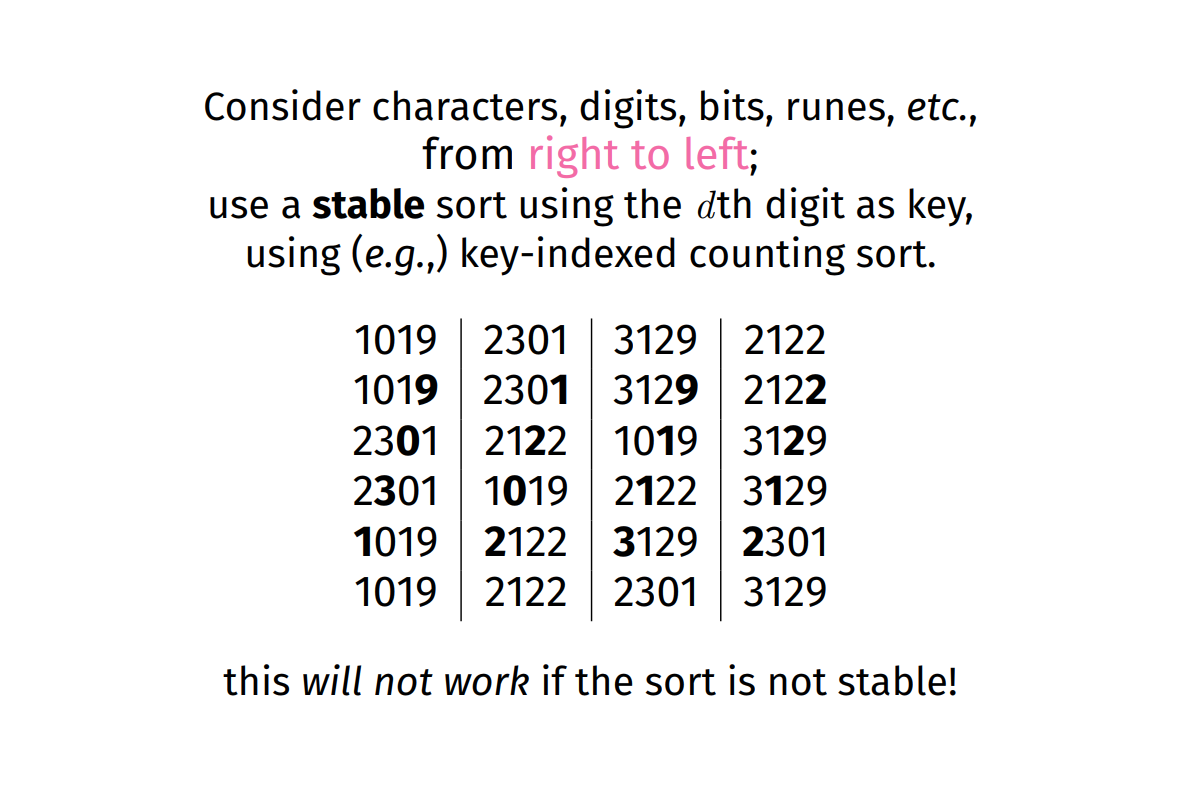
- Non-comparison
- Just access keys based on ordered values
- O(n) worst case
- Non-comparison
- Steps:
- Add all items to pqueue (implemented as heap).
- Remove items from pqueue into original array.
- best: Ω(n log(n))
- worst: O(n log(n))
- not stable
- Non-comparison
- Only if we can decompose keys
- Sorting individually on each part of the key at a time:
- digit by digit
- digit by digit
- Time complexity O(kn)
-
Degenerate trees: height is at most n - 1 <- We're trying to avoid this
- Ascending-ordered or descending ordered is a pathalogical case
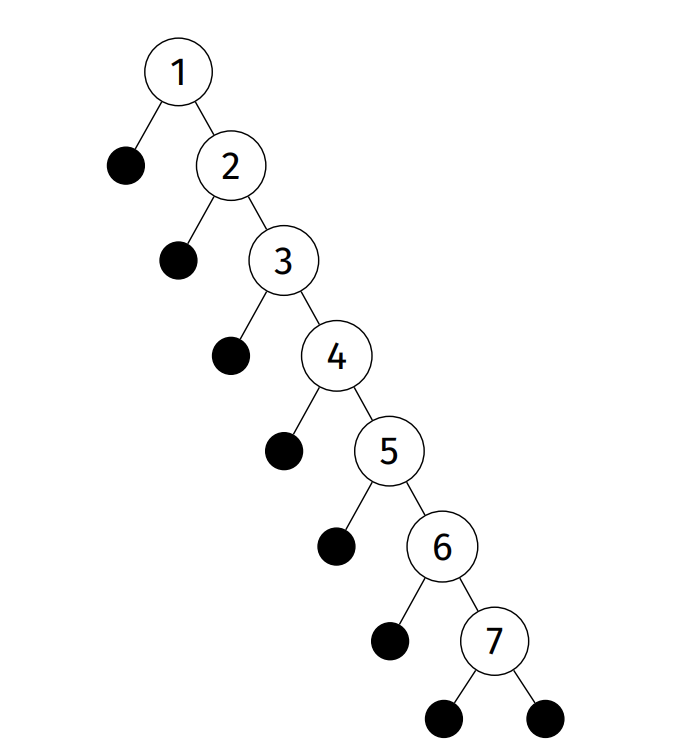
- Ascending-ordered or descending ordered is a pathalogical case
-
Balanced trees: height is at least log n
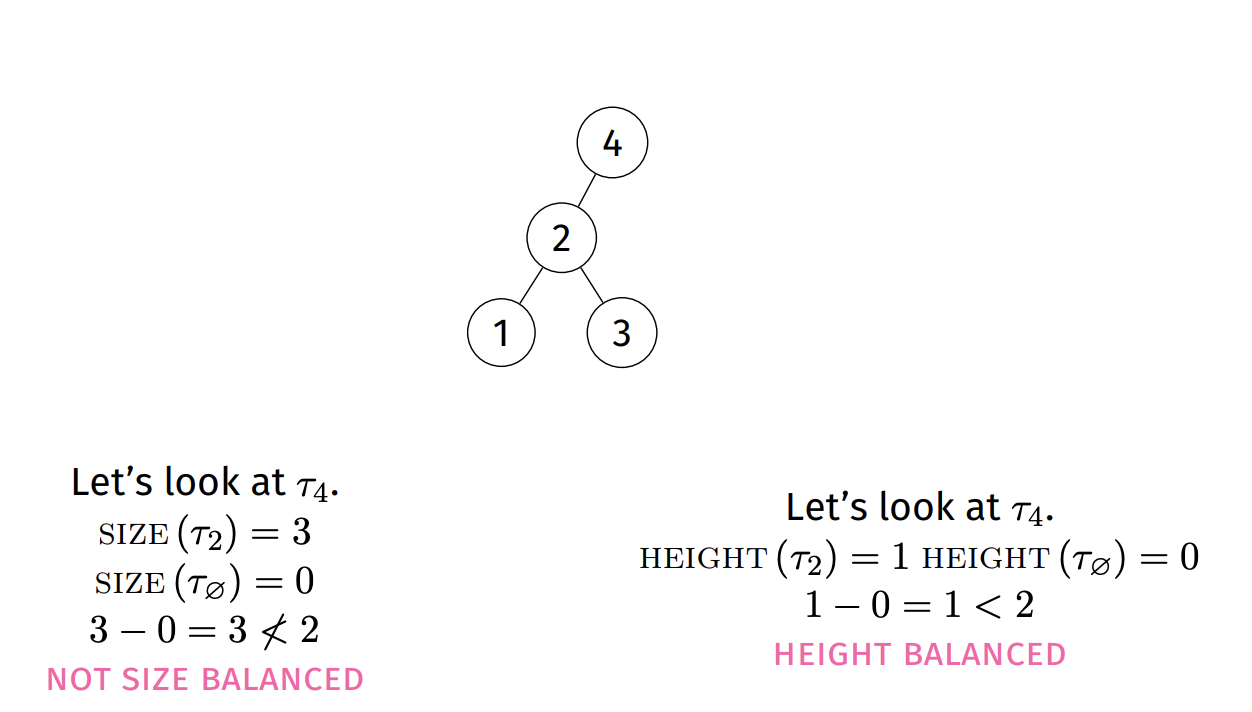
- Size balanced: |size(t.L) - size(t.R)| < 2
- Height balanced: |height(t.L) - height(t.R)| < 2
-
Costs for Degenerate
- Insertion ~ O(n)
- Search / Deletion ~ O(n)
-
Costs for Balanced
- Insertion ~ O(log n)
- Search / Deletion ~ O(log n)
-
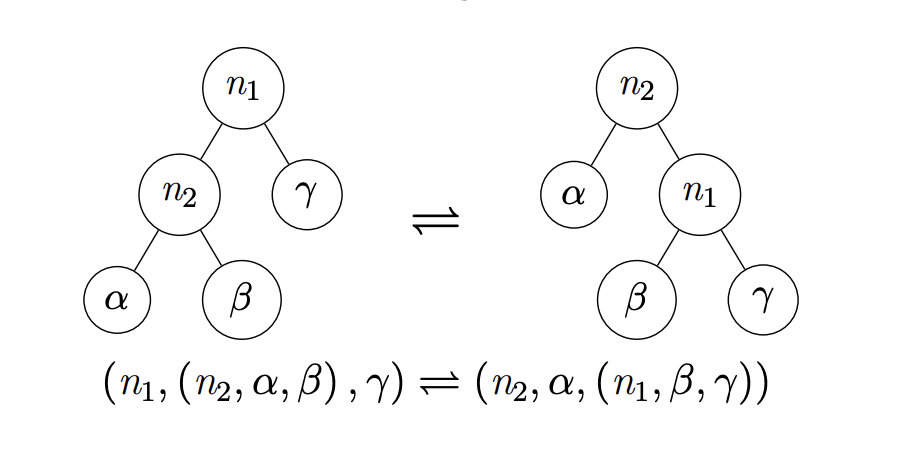
Right and Left Rotations: primitive operations that change the balance of a tree whilst maintaining a search tree
-
Partition is a way to brute force some balance into a tree, by lifting some kth index to the root.
-
Global rebalancing: move the median node to the root by partitioning on
size / 2index; then left sub tree and right subtree
btree_node *btree_balance_global (btree_node *tree)
{
if (tree == NULL) return NULL;
if (size (tree) < 2) return tree;
tree = partition (tree, size (tree) / 2);
tree->left = btree_balance_global (tree->left);
tree->right = btree_balance_global (tree->right);
return tree;
}-
Cost for global rebalancing
- Dengerate ~ O(n log n)
- Balanced ~ O(n)
-
Local rebalancing: do small, incremental operations to improve the overall balance of the tree at the cost of imperfect balance
-
Amortisation: do small amount of work now to avoid more work later. (ie. splay tree operations)
-
Randomisation: use randomness to reduce impact of BST worst cases.
-
Optimisation: maintain structural information for performance. (ie. include size attribute on each node on btree)
-
Root insertion
- How to insert a node at the root without having to rearrage all node?
- Do a leaf insertion and rotate the new node up the tree
- Same complexity as leaf insertion
-
Random insertion
- We randomly choose which level to insert a node
- Do a normal leaf insetion, most of the time. Random with certain probability
- Do a root insertion of a value.
- Basically randomly choosing to do a root insertion or note
- Root insertions can still leave us with a degenerate tree.
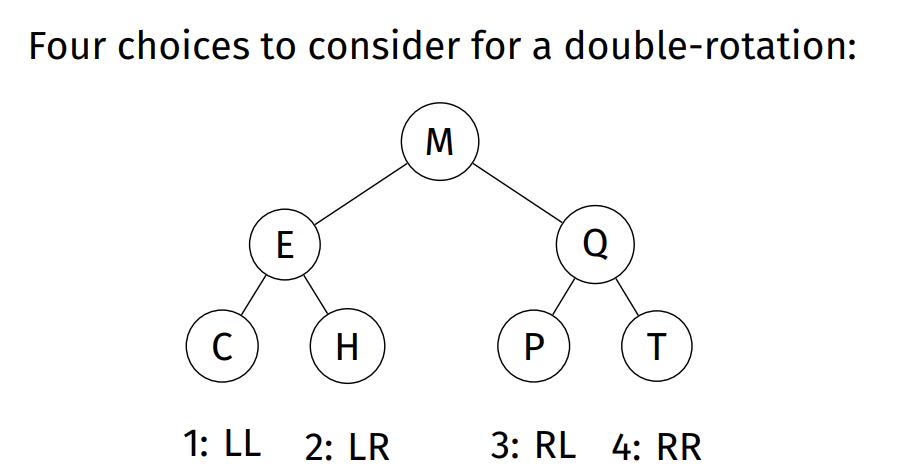
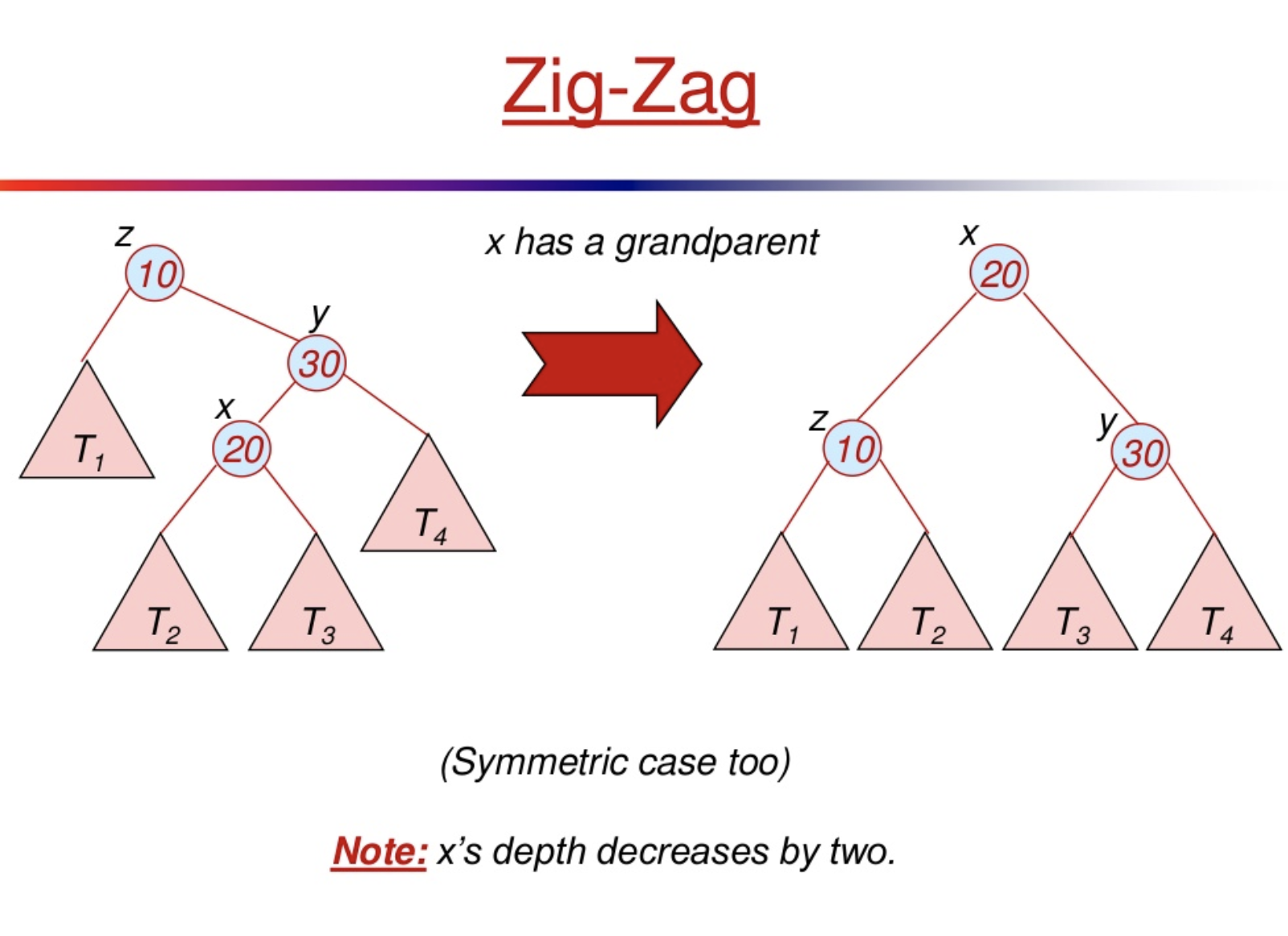
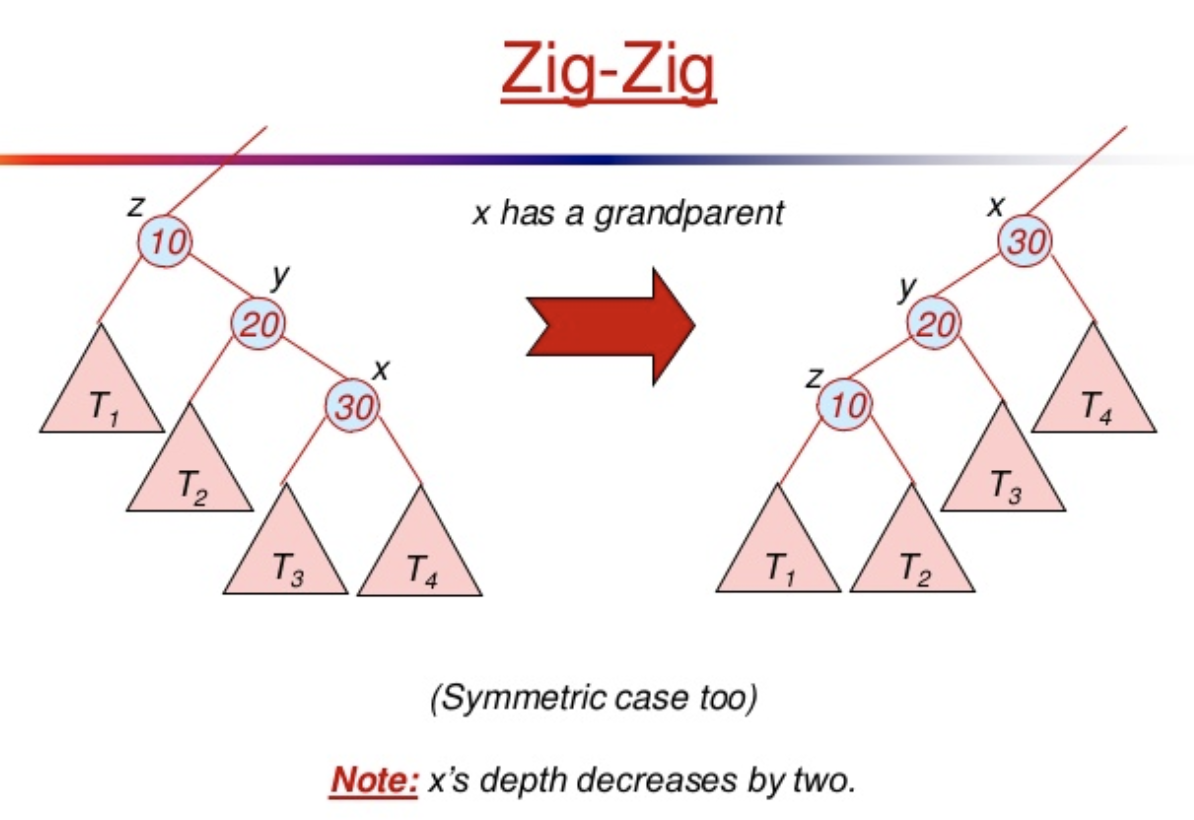
- Splay trees vary root-insertion by considering three levels of the tree
- parent, child, grandchild
- performs double-rotations based on p-c-g orientation
- Fast ACCESS TO ELEMENTS RECENTLY ACCESSED
- Don't care about balance, just want the root to be most recently accessed node.
- All operations:
O(log n)on average /O(n)on worst case ~ n is number of nodes on tree - Any sequence of
koperations, starting from empty tree, never>ntree, any tree operation takesO(k log n), worst case time - Basis: Splay trees kepted in balance with rotations (rotate left, rotate right).
- Splay trees are NOT kept perfectly balanced -> that why operations maybe
O(n)- Ie. Inserting 1...n, and having to splay to root, creates a degenerate tree
-
3 Cases for rotating:
- (Zig-Zag) X is a left child of a right child OR X is a right child of a left child.
- (Zig-Zig) X is a left child of a left child OR X is a right child of a right child.
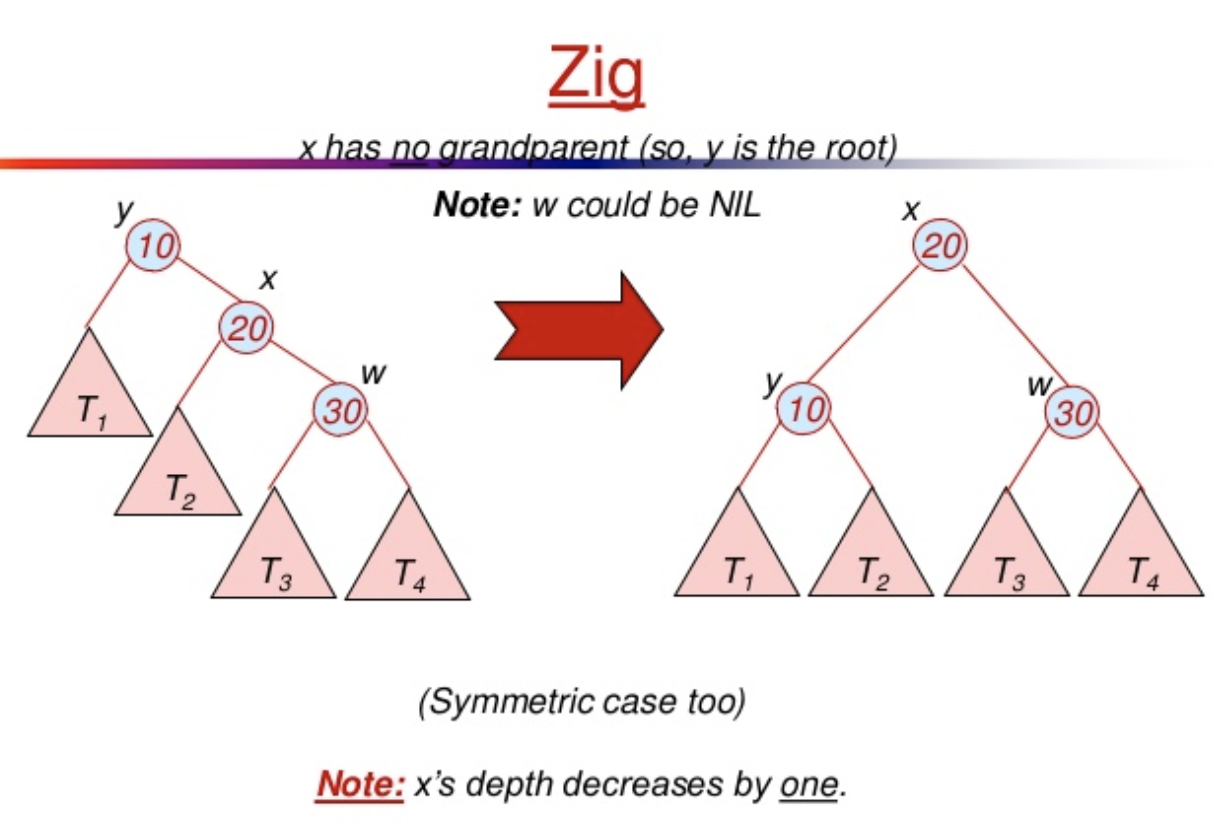
- (Zig) X is a child of the root
- (Zig-Zag) X is a left child of a right child OR X is a right child of a left child.
-
Search (key)
- Regularly to a binary search tree
- Walk down a tree, deciding to walk left / right, until we reach k or a dead-end
- Let X be the node where search ended, whether it contains key or not.
- Splay X up the tree through a sequence of rotations, so X becomes the root
- Super fast performance when searching for same key over and over again
-
Find Min / Max
- Keep walking to the left / right
- Splay last node to the root
-
Insert a new key and value
- Insert into tree like a normal binary tree
- Splay new node to the root
-
Remove (key)
- Remove a key like a normal BST.
- Keep track of actual node that got remove (ie. the left most value from right sub tree), we'll call it X
- Spay X's parent to the root
-
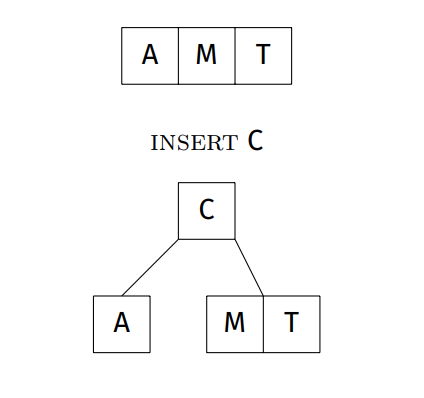
Each node can have 3 kinds of nodes:
- 2-nodes: 1 values ~ 2 children
- 3-nodes: 2 values ~ 3 children
- 4-nodes: 3 values ~ 4 children
-
Each node stores three vvalues at most (from smallest to greatest)
-
2-3-4 trees grow 'upwards' from the leaves all of which are equidistant to the root.
-
Self balancing data structure, commonly used to implement dictionaries.
-
Always balanced; depth is
O(log n)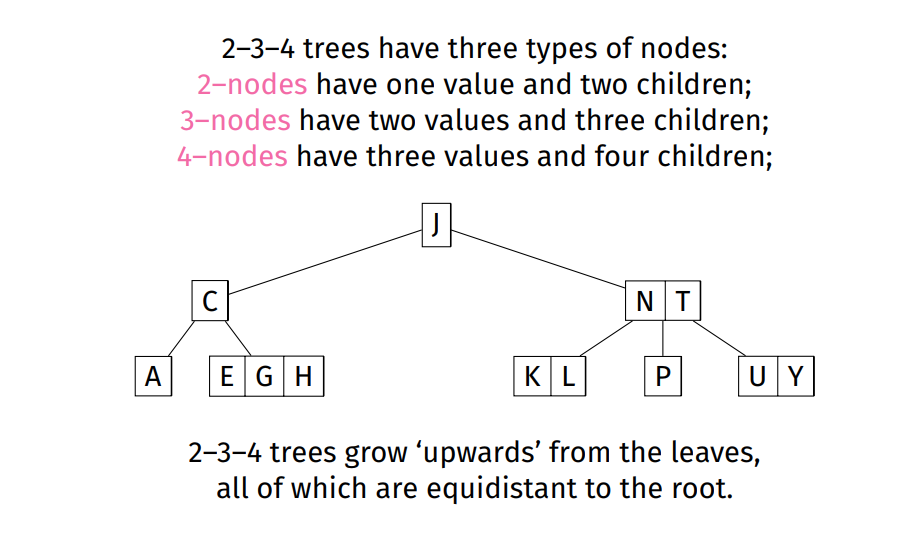
-
Worst case for depth: all nodes are 2-nodes ~ depth = log_2 n
-
Best case for depth: all nodes are 4-nodes ~ depth = log_4 n
-
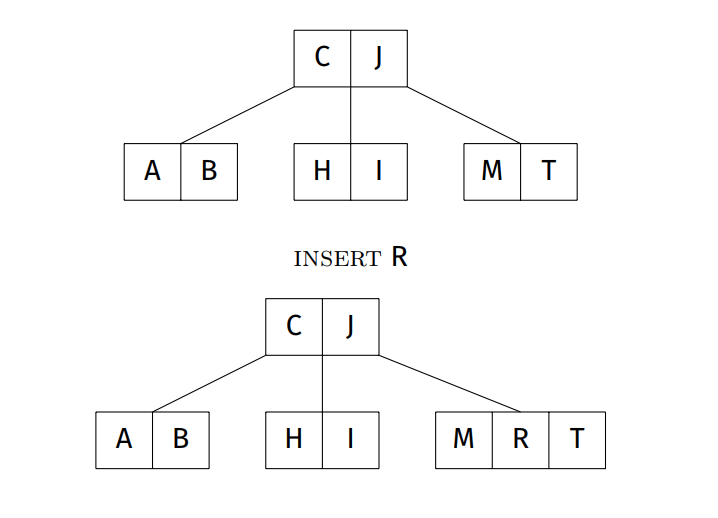
Insertion steps
- Find leaf node where item belongs (via search)
- if node is not full (ie. order < 4), insert item in this node, order++
- if node is full (ie. contains 3 items - 4 node)
- split into two 2-nodes as leaves
- promote middle element to parent
- insert item into appropriate leaf 2-node
- if parent is a 4-node, continue split / promote upwards
- if promote to root, and root is a 4-node, split root node and add new root
-
Insertion examples:
- Representations of 2-3-4 trees
- Using BST nodes
- Gets benefits of 2-3-4 tree self-balancing on insert, delete ...
- Uses labels to tell us when to rebalance
- Rules
- Root Property: Root node is always black
- External Propery: Every external node is always black
- Red Property: Children of red nodes are black
- Depth Property: All nodes have the same black depth
- Fix cases
- When uncle is black -> we rotate
- When uncle is red -> we colour flip
- Red Links:
- combine nodes to represent 3 and 4 nodes
- child along red link is a 2-3-4 neighbour
- Black Links:
- Ordinary child links
- Operations
- Search: O(log n)
- No different from regular BST
- Insert: O(log n)
- Remove: O(log n)
- Search: O(log n)
-
Linked list, Tree, etc... have pretty slow insert and search operations
-
They don't take advantage of cache locality
-
Hashing lets us approximate
- Arbitrary keys (ie. strings etc)
- Map key into a compact range of index values
- Store items in array, accessed by index value
- O(1)
-
What we need
- Array of items
- Hash function: hash(key) -> index
- Collision resolution method (ie. when value already exists for given key)
-
Properties we want for the hashing function,
h:- For a table size
N, output range is0toN-1 - pure, deterministic
h(k,N)~ ie. gives same result - spreads key values uniformly over index range
- cheap (enough) to compute
- For a table size
-
Other properties we need for
h:- Pre-image resistant:
h=HASH(M), given h, hard to pickm - Second pre-image resistant: for
HASH(m1) = HASH(m2), givenm1, it's hard to findm2 - Collision resistant: hard to find
m1andm2
- Pre-image resistant:
-
What if two keys hash to the same index?
- Allow for multiple items in a single location?
- Systematically compute new indices by various probing strategies
- Resize the array by adjusting hashing function, and rehash all values into new array
-
Given
Nslots andMitems:- best case: all lists have length
M/N - worst case: one list with length
M, all other 0
- best case: all lists have length
-
With good hash and
M <= N, costO(1) -
With good hash and
M > N, costO(M/N) -
M/Nratio is called load -
Collision Resolution
- Chaining
- Using a linked list
- Using a tree (a bit more efficent O(log n) search)
- Linear Probing
- If table is not close to being full, there are still many empty slots, we could just use the next available slot along
- to reach first item: O(1)
- to reach subsequent items, depends on
load - worst case: O(N)
- If table is not close to being full, there are still many empty slots, we could just use the next available slot along
- Double Hash Probing
- If key already exists, hash again and add the new value to the incremented index (ie. index = hash1(key) + hash2(key))
- Hash1 to Hash2 should be relatively prime to each other, and to N
- Faster than linear probing
- MUST NEVER BE EVALUATED TO 0!!!
- Choose a hash function:
- P = prime number less than NSLOTS
- steps = H_2(x) = P - (x % p)
- Move step + h(x) ~ ie. increment steps using H_2 from original hash output
- Resize table
- You'll need to rehash and insert into table again.
- Chaining
-
Performance:
- Good HASH function is critical
- Choosing a good N for M is critical (ie. managing the load)
- Choosing a good resolution approach is critical
- Linear probing is fastest, given big N!
- Double hasing: faster for higher load, more efficient
- Chaining: pssible for loads that are greater than 1, but degenerates
Node MergeLists(Node list1, Node list2) {
if (list1 == null) return list2;
if (list2 == null) return list1;
if (list1.data < list2.data) {
list1.next = MergeLists(list1.next, list2);
return list1;
} else {
list2.next = MergeLists(list2.next, list1);
return list2;
}
}// Tree clone
Tree *tree_clone (Tree t)
{
if (!t) return t;
Tree new = malloc(sizeof(*new));
new->item = t->item; // copy item from tree
new->left = tree_clone(t->left);
new->right = tree_clone(t->left);
return new;
}
// Tree reverse
void tree_reverse (Tree t)
{
if (!t) return;
Tree tmp = t->left;
t->left = t->right;
t->right = tmp;
tree_reverse (t->left);
tree_reverse (t->right);
}
// Check if two trees are equal
bool tree_eq (Tree t1, Tree t2)
{
if (!t1 && !t2) return true;
if (t1 && t2) {
return (t1->val == t2->val)
&& tree_eq (t1->left, t2->left)
&& tre_eq (t1->right, t2->right);
}
return false;
}link list_duplicate (link l)
{
link new;
if (l == NULL)
return NULL;
new = node_new(l->item);
new->next = list_duplicate (l->next);
return new;
}
link dlist_duplicate (dlink l, prev)
{
dlink new;
if (l == NULL)
return NULL;
new = node_new (l->item);
new->prev = prev;
new->next = list_duplicate (l->next, l);
return new;
}