|
<?xml version="1.0" encoding="UTF-8"?> |
|
<MCConfiguration> |
|
<l_min_vin>8</l_min_vin> |
|
<foc_encoder_inverted>0</foc_encoder_inverted> |
|
<foc_sl_openloop_time>0.1</foc_sl_openloop_time> |
|
<foc_observer_gain_slow>0.3</foc_observer_gain_slow> |
|
<m_sensor_port_mode>0</m_sensor_port_mode> |
|
<l_max_erpm_fbrake_cc>1500</l_max_erpm_fbrake_cc> |
|
<l_min_erpm>-100000</l_min_erpm> |
|
<s_pid_kd>0.0001</s_pid_kd> |
|
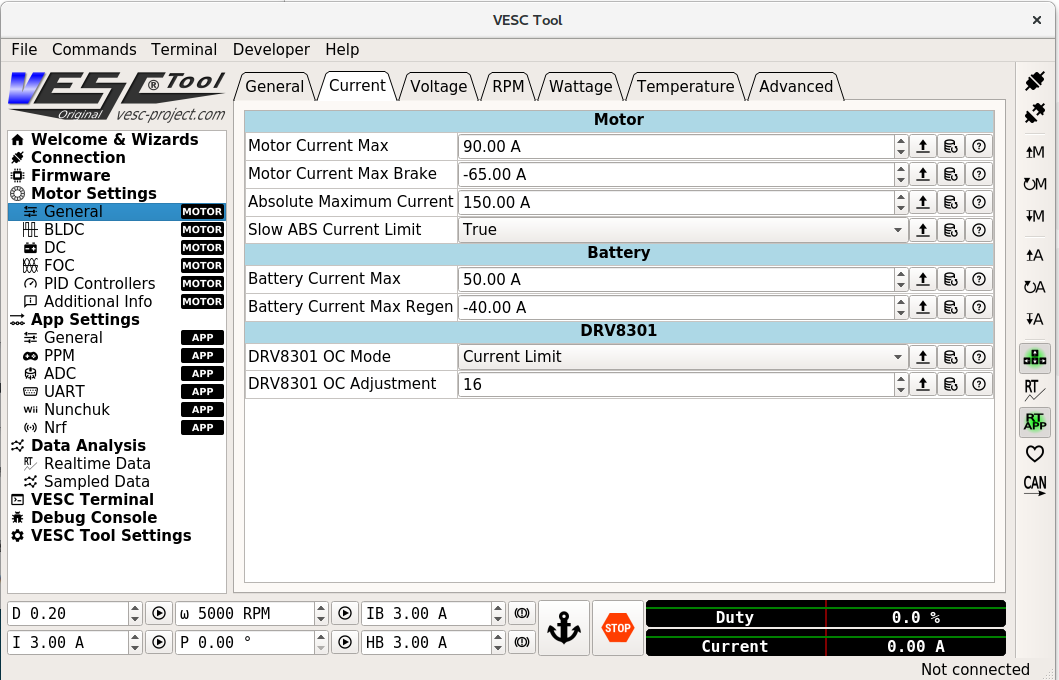
<m_drv8301_oc_adj>16</m_drv8301_oc_adj> |
|
<l_in_current_max>45</l_in_current_max> |
|
<foc_sensor_mode>0</foc_sensor_mode> |
|
<s_pid_allow_braking>1</s_pid_allow_braking> |
|
<motor_quality_bearings>0</motor_quality_bearings> |
|
<motor_quality_description><!DOCTYPE HTML PUBLIC "-//W3C//DTD HTML 4.0//EN" "http://www.w3.org/TR/REC-html40/strict.dtd"> |
|
<html><head><meta name="qrichtext" content="1" /><style type="text/css"> |
|
p, li { white-space: pre-wrap; } |
|
</style></head><body style=" font-family:'Sans Serif'; font-size:11pt; font-weight:400; font-style:normal;"> |
|
<p style=" margin-top:0px; margin-bottom:0px; margin-left:0px; margin-right:0px; -qt-block-indent:0; text-indent:0px;">Some comments about the motor quality. Images can be added as well.</p></body></html></motor_quality_description> |
|
<s_pid_ki>0.004</s_pid_ki> |
|
<foc_encoder_offset>180</foc_encoder_offset> |
|
<cc_startup_boost_duty>0.01</cc_startup_boost_duty> |
|
<motor_description><!DOCTYPE HTML PUBLIC "-//W3C//DTD HTML 4.0//EN" "http://www.w3.org/TR/REC-html40/strict.dtd"> |
|
<html><head><meta name="qrichtext" content="1" /><style type="text/css"> |
|
p, li { white-space: pre-wrap; } |
|
</style></head><body style=" font-family:'Sans Serif'; font-size:11pt; font-weight:400; font-style:normal;"> |
|
<p style=" margin-top:0px; margin-bottom:0px; margin-left:0px; margin-right:0px; -qt-block-indent:0; text-indent:0px;">A motor description can be edited here.</p></body></html></motor_description> |
|
<motor_type>2</motor_type> |
|
<l_temp_fet_end>100</l_temp_fet_end> |
|
<sensor_mode>0</sensor_mode> |
|
<s_pid_kp>0.004</s_pid_kp> |
|
<foc_sl_d_current_duty>0</foc_sl_d_current_duty> |
|
<sl_cycle_int_limit>62</sl_cycle_int_limit> |
|
<foc_temp_comp>0</foc_temp_comp> |
|
<l_max_erpm>100000</l_max_erpm> |
|
<s_pid_min_erpm>900</s_pid_min_erpm> |
|
<m_dc_f_sw>35000</m_dc_f_sw> |
|
<foc_current_ki>12.56</foc_current_ki> |
|
<foc_sl_erpm>2500</foc_sl_erpm> |
|
<cc_ramp_step_max>0.04</cc_ramp_step_max> |
|
<m_duty_ramp_step>0.02</m_duty_ramp_step> |
|
<m_drv8301_oc_mode>0</m_drv8301_oc_mode> |
|
<foc_sample_v0_v7>1</foc_sample_v0_v7> |
|
<motor_brand>Unnamed</motor_brand> |
|
<cc_min_current>0.1</cc_min_current> |
|
<foc_current_kp>0.0078</foc_current_kp> |
|
<foc_motor_flux_linkage>0.003917</foc_motor_flux_linkage> |
|
<foc_f_sw>20000</foc_f_sw> |
|
<sl_max_fullbreak_current_dir_change>10</sl_max_fullbreak_current_dir_change> |
|
<m_encoder_counts>8192</m_encoder_counts> |
|
<motor_sensor_type>0</motor_sensor_type> |
|
<l_battery_cut_start>24.8</l_battery_cut_start> |
|
<p_pid_ang_div>1</p_pid_ang_div> |
|
<foc_motor_l>7.8e-6</foc_motor_l> |
|
<foc_hall_table_0>255</foc_hall_table_0> |
|
<foc_motor_r>0.0126</foc_motor_r> |
|
<foc_hall_table_1>255</foc_hall_table_1> |
|
<foc_encoder_ratio>7</foc_encoder_ratio> |
|
<foc_hall_table_2>255</foc_hall_table_2> |
|
<l_temp_motor_end>100</l_temp_motor_end> |
|
<foc_hall_table_3>255</foc_hall_table_3> |
|
<motor_loss_torque>0.03</motor_loss_torque> |
|
<foc_pll_ki>40000</foc_pll_ki> |
|
<foc_hall_table_4>255</foc_hall_table_4> |
|
<l_watt_min>-15000</l_watt_min> |
|
<foc_hall_table_5>255</foc_hall_table_5> |
|
<foc_hall_table_6>255</foc_hall_table_6> |
|
<m_fault_stop_time_ms>1000</m_fault_stop_time_ms> |
|
<foc_hall_table_7>255</foc_hall_table_7> |
|
<motor_model>Not Specified</motor_model> |
|
<m_invert_direction>0</m_invert_direction> |
|
<foc_sl_d_current_factor>0</foc_sl_d_current_factor> |
|
<foc_pll_kp>2000</foc_pll_kp> |
|
<m_bldc_f_sw_min>3000</m_bldc_f_sw_min> |
|
<motor_poles>14</motor_poles> |
|
<foc_duty_dowmramp_ki>200</foc_duty_dowmramp_ki> |
|
<cc_gain>0.0046</cc_gain> |
|
<l_min_duty>0.005</l_min_duty> |
|
<foc_dt_us>0.08</foc_dt_us> |
|
<l_temp_fet_start>80</l_temp_fet_start> |
|
<sl_phase_advance_at_br>0.8</sl_phase_advance_at_br> |
|
<l_max_vin>57</l_max_vin> |
|
<motor_quality_magnets>0</motor_quality_magnets> |
|
<foc_temp_comp_base_temp>25</foc_temp_comp_base_temp> |
|
<l_watt_max>15000</l_watt_max> |
|
<foc_duty_dowmramp_kp>10</foc_duty_dowmramp_kp> |
|
<sl_min_erpm_cycle_int_limit>1100</sl_min_erpm_cycle_int_limit> |
|
<l_current_min>-65</l_current_min> |
|
<m_bldc_f_sw_max>40000</m_bldc_f_sw_max> |
|
<sl_min_erpm>150</sl_min_erpm> |
|
<hall_sl_erpm>2000</hall_sl_erpm> |
|
<l_battery_cut_end>23.2</l_battery_cut_end> |
|
<foc_observer_gain>6.518e+7</foc_observer_gain> |
|
<motor_quality_construction>0</motor_quality_construction> |
|
<l_erpm_start>0.8</l_erpm_start> |
|
<l_abs_current_max>150</l_abs_current_max> |
|
<l_max_duty>0.95</l_max_duty> |
|
<m_current_backoff_gain>0.5</m_current_backoff_gain> |
|
<l_in_current_min>-40</l_in_current_min> |
|
<pwm_mode>1</pwm_mode> |
|
<p_pid_kd>0.0004</p_pid_kd> |
|
<sl_bemf_coupling_k>600</sl_bemf_coupling_k> |
|
<l_max_erpm_fbrake>300</l_max_erpm_fbrake> |
|
<hall_table_0>-1</hall_table_0> |
|
<hall_table_1>1</hall_table_1> |
|
<p_pid_ki>0</p_pid_ki> |
|
<hall_table_2>3</hall_table_2> |
|
<l_temp_motor_start>80</l_temp_motor_start> |
|
<foc_openloop_rpm>400</foc_openloop_rpm> |
|
<hall_table_3>2</hall_table_3> |
|
<comm_mode>0</comm_mode> |
|
<l_slow_abs_current>1</l_slow_abs_current> |
|
<l_current_max>90</l_current_max> |
|
<hall_table_4>5</hall_table_4> |
|
<motor_weight>0</motor_weight> |
|
<hall_table_5>6</hall_table_5> |
|
<sl_cycle_int_rpm_br>80000</sl_cycle_int_rpm_br> |
|
<hall_table_6>4</hall_table_6> |
|
<hall_table_7>-1</hall_table_7> |
|
<p_pid_kp>0.03</p_pid_kp> |
|
<foc_sat_comp>0</foc_sat_comp> |
|
<foc_sl_openloop_hyst>0.1</foc_sl_openloop_hyst> |
|
</MCConfiguration> |