Collection of samples of code for effects and procedural generation
-
-
Save mitjmcc/d76e8a0b9316a429482b54e19de3dd7d to your computer and use it in GitHub Desktop.
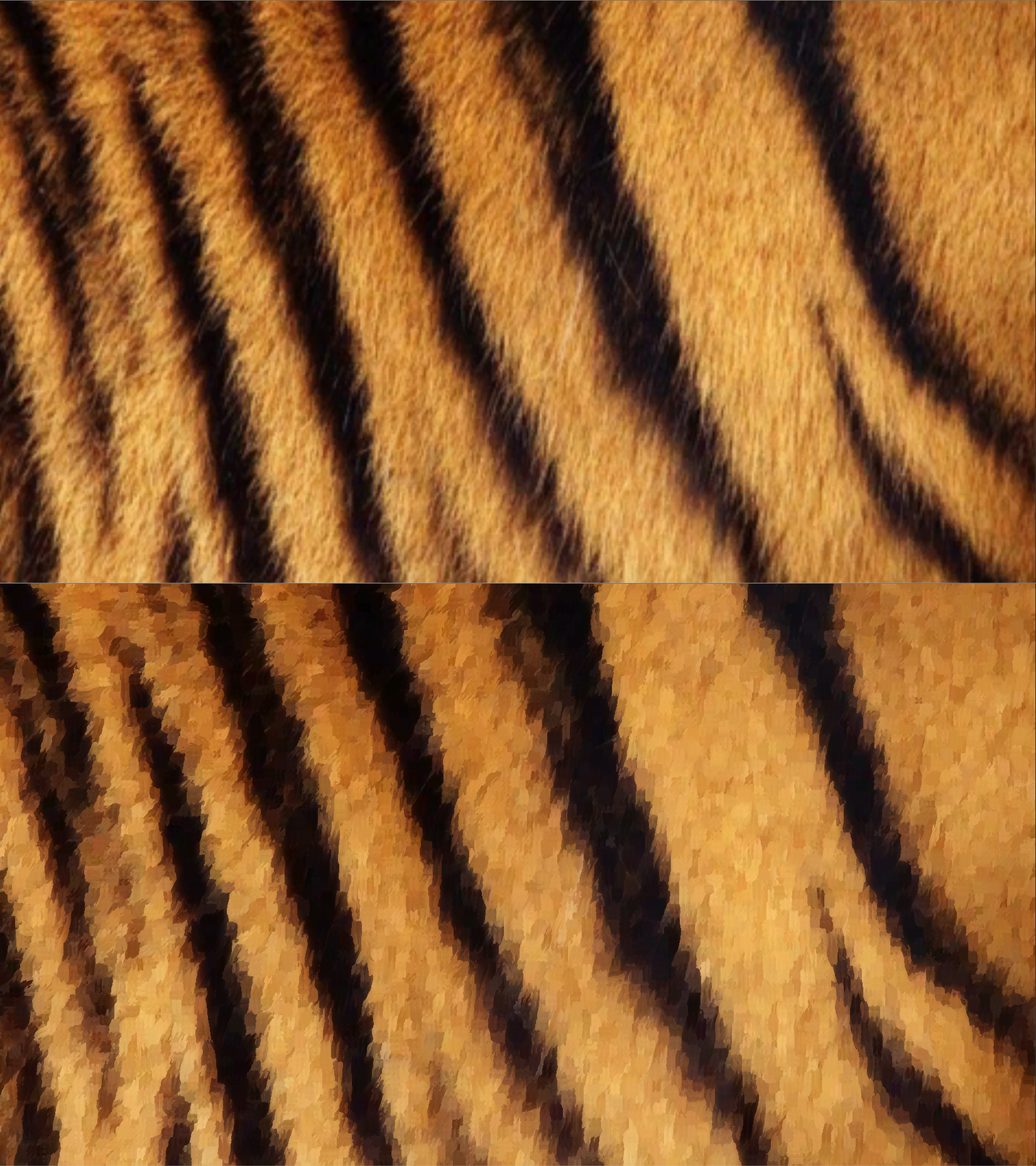
The effect emulates oil paint with a post processing effect using Shaderlab in Unity3D.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Shader "Custom/Kuwahara" | |
| { | |
| Properties | |
| { | |
| _MainTex("Texture", 2D) = "white" {} | |
| _Radius ("Size of the Strokes", Range(0, 10)) = 3 | |
| } | |
| SubShader | |
| { | |
| Cull Off ZWrite Off ZTest Always | |
| Pass | |
| { | |
| CGPROGRAM | |
| #pragma vertex vert | |
| #pragma fragment frag | |
| #include "UnityCG.cginc" | |
| uniform sampler2D _MainTex; | |
| uniform int _Radius; | |
| struct v2f { | |
| float4 position : POSITION; | |
| float4 uv : TEXCOORD0; | |
| float4 screenPos : TEXCOORD1; | |
| }; | |
| v2f_img vert(appdata_base v) { | |
| v2f_img o; | |
| o.pos = UnityObjectToClipPos(v.vertex); | |
| o.uv = v.texcoord; | |
| return o; | |
| } | |
| struct region { | |
| int x1, y1, x2, y2; | |
| }; | |
| float4 _MainTex_TexelSize; | |
| float4 frag (v2f i) : SV_Target | |
| { | |
| float w = i.screenPos.w; | |
| float2 uv = i.uv; | |
| float n = float((_Radius + 1) * (_Radius + 1)); | |
| float4 col = tex2D(_MainTex, uv); | |
| float3 m[4]; | |
| float3 s[4]; | |
| for (int k = 0; k < 4; ++k) { | |
| m[k] = float3(0, 0, 0); | |
| s[k] = float3(0, 0, 0); | |
| } | |
| region R[4] = { | |
| {-_Radius, -_Radius, 0, 0}, | |
| { 0, -_Radius, _Radius, 0}, | |
| { 0, 0, _Radius, _Radius}, | |
| {-_Radius, 0, 0, _Radius} | |
| }; | |
| for (int k = 0; k < 4; ++k) { | |
| for (int j = R[k].y1; j <= R[k].y2; ++j) { | |
| for (int i = R[k].x1; i <= R[k].x2; ++i) { | |
| float3 c = tex2D(_MainTex, uv + (float2(i * _MainTex_TexelSize.x, j * _MainTex_TexelSize.y))).rgb; | |
| m[k] += c; | |
| s[k] += c * c; | |
| } | |
| } | |
| } | |
| float min = 1e+2; | |
| float s2; | |
| for (int k = 0; k < 4; ++k) { | |
| m[k] /= n; | |
| s[k] = abs(s[k] / n - m[k] * m[k]); | |
| s2 = s[k].r + s[k].g + s[k].b; | |
| if (s2 < min) { | |
| min = s2; | |
| col.rgb = m[k].rgb; | |
| } | |
| } | |
| return col; | |
| } | |
| ENDCG | |
| } | |
| } | |
| } |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| #include "simulator.h" | |
| #include <fstream> | |
| #include <iostream> | |
| using namespace std; | |
| double _radius = 0.2; | |
| double _distance = 0.1; | |
| /** | |
| * Implementation of Physically Based Modeling Constrained Dynamics | |
| * This class is instantiated and run in a main.cpp using GLUT | |
| */ | |
| Simulator::Simulator() { | |
| // initialize the particles | |
| mParticles.resize(2); | |
| // Init particle positions (default is 0, 0, 0) | |
| mParticles[0].mPosition[0] = _radius; | |
| mParticles[1].mPosition[0] = _radius; | |
| mParticles[1].mPosition[1] = _radius - _distance; | |
| mTimeStep = 0.0003; | |
| } | |
| int Simulator::getNumParticles() { | |
| return mParticles.size(); | |
| } | |
| Particle* Simulator::getParticle(int index) { | |
| return &mParticles[index]; | |
| } | |
| double Simulator::getTimeStep() { | |
| return mTimeStep; | |
| } | |
| void Simulator::reset() { | |
| mParticles[0].mPosition[1] = 0.0; | |
| mParticles[0].mPosition[0] = 0.2; | |
| mParticles[1].mPosition[0] = 0.2; | |
| mParticles[1].mPosition[1] = -0.1; | |
| for (int i = 0; i < getNumParticles(); i++) { | |
| mParticles[i].mVelocity.setZero(); | |
| mParticles[i].mAccumulatedForce.setZero(); | |
| } | |
| } | |
| void Simulator::simulate() { | |
| // Applying gravity, the only external force in this system | |
| for (int i = 0; i < (int) mParticles.size(); i++) { | |
| mParticles[i].mAccumulatedForce[1] -= 9.8 * mParticles[i].mMass; | |
| } | |
| // Caching the position and velocity of particle 1 and 2 | |
| Eigen::Vector3d x1 = mParticles[0].mPosition; | |
| Eigen::Vector3d x2 = mParticles[1].mPosition; | |
| Eigen::Vector3d v1 = mParticles[0].mVelocity; | |
| Eigen::Vector3d v2 = mParticles[1].mVelocity; | |
| // q dot, the velocity vector | |
| Eigen::Matrix<double, 6, 1> qd; | |
| qd << v1, v2; | |
| // Q, the global force vector | |
| Eigen::Matrix<double, 6, 1> Q; | |
| Q << mParticles[0].mAccumulatedForce, | |
| mParticles[1].mAccumulatedForce; | |
| double m0 = mParticles[0].mMass, | |
| m1 = mParticles[1].mMass; | |
| // M, the mass matrix | |
| M.diagonal() << m0, m0, m0, m1, m1, m1; | |
| // W, the inverse mass matrix | |
| W = M.inverse(); | |
| Eigen::Vector3d x1_x2 = x1 - x2; | |
| // J, the Jacobian matrix of the constraints C | |
| J << x1.transpose(), 0, 0, 0, | |
| x1_x2.transpose(), -x1_x2.transpose(); | |
| Eigen::Vector3d v1_v2 = v1 - v2; | |
| // J dot, the time derivative of the Jacobian | |
| Jd << v1.transpose(), 0, 0, 0, | |
| v1_v2.transpose(), -v1_v2.transpose(); | |
| // C, the constraint vector function | |
| Eigen:: Matrix<double, 2, 1> C; | |
| C << 0.5 * (x1.dot(x1) - _radius * _radius), | |
| 0.5 * ((x1 - x2).dot(x1 - x2) - _distance * _distance); | |
| // C dot, the derivative constraint vector function | |
| Eigen:: Matrix<double, 2, 1> Cd; | |
| Cd << x1.dot(v1), | |
| x1.dot(v1) - x1.dot(v2) - x2.dot(v1) + x2.dot(v2); | |
| // Computing λ, the Lagrange multiplier vector | |
| // given JWJ^Tλ = −J˙q˙ − JWQ − ksC − kdC˙ | |
| // Feedback terms to account for numerical drift | |
| double ks = 0.2, | |
| kd = 0.2; | |
| // Collecting terms from the above equation | |
| Eigen::Matrix<double, 2, 1> B = (-Jd) * qd - J * W * Q - ks * C - kd * Cd; | |
| Eigen::Matrix<double, 2, 2> A = J * W * J.transpose(); | |
| // Solve for λ | |
| Eigen::Matrix<double, 2, 1> lambda = A.inverse() * B; | |
| // Compute the constraint force | |
| Eigen::Matrix<double, 6, 1> Qhat = J.transpose() * lambda; | |
| // Apply the contstraint force | |
| mParticles[0].mAccumulatedForce += Eigen::Vector3d(Qhat(0, 0), Qhat(1, 0), Qhat(2, 0)); | |
| mParticles[1].mAccumulatedForce += Eigen::Vector3d(Qhat(3, 0), Qhat(4, 0), Qhat(5, 0)); | |
| // Use Semi Implicit Euler integration | |
| for (int i = 0; i < (int) mParticles.size(); i++) { | |
| mParticles[i].mVelocity += mParticles[i].mAccumulatedForce / mParticles[i].mMass * mTimeStep; | |
| mParticles[i].mPosition += mParticles[i].mVelocity * mTimeStep; | |
| } | |
| for (int i = 0; i < (int) mParticles.size(); i++) { | |
| mParticles[i].mAccumulatedForce.setZero(); | |
| } | |
| } |

Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment