-
-
Save muety/2a6722407117e4d668921fce53845432 to your computer and use it in GitHub Desktop.
| # Inspired by https://keon.io/deep-q-learning/ | |
| import random | |
| import gym | |
| import math | |
| import numpy as np | |
| from collections import deque | |
| from keras.models import Sequential | |
| from keras.layers import Dense | |
| from keras.optimizers import Adam | |
| class DQNCartPoleSolver(): | |
| def __init__(self, n_episodes=1000, n_win_ticks=195, max_env_steps=None, gamma=1.0, epsilon=1.0, epsilon_min=0.01, epsilon_log_decay=0.995, alpha=0.01, alpha_decay=0.01, batch_size=64, monitor=False, quiet=False): | |
| self.memory = deque(maxlen=100000) | |
| self.env = gym.make('CartPole-v0') | |
| if monitor: self.env = gym.wrappers.Monitor(self.env, '../data/cartpole-1', force=True) | |
| self.gamma = gamma | |
| self.epsilon = epsilon | |
| self.epsilon_min = epsilon_min | |
| self.epsilon_decay = epsilon_log_decay | |
| self.alpha = alpha | |
| self.alpha_decay = alpha_decay | |
| self.n_episodes = n_episodes | |
| self.n_win_ticks = n_win_ticks | |
| self.batch_size = batch_size | |
| self.quiet = quiet | |
| if max_env_steps is not None: self.env._max_episode_steps = max_env_steps | |
| # Init model | |
| self.model = Sequential() | |
| self.model.add(Dense(24, input_dim=4, activation='tanh')) | |
| self.model.add(Dense(48, activation='tanh')) | |
| self.model.add(Dense(2, activation='linear')) | |
| self.model.compile(loss='mse', optimizer=Adam(lr=self.alpha, decay=self.alpha_decay)) | |
| def remember(self, state, action, reward, next_state, done): | |
| self.memory.append((state, action, reward, next_state, done)) | |
| def choose_action(self, state, epsilon): | |
| return self.env.action_space.sample() if (np.random.random() <= epsilon) else np.argmax(self.model.predict(state)) | |
| def get_epsilon(self, t): | |
| return max(self.epsilon_min, min(self.epsilon, 1.0 - math.log10((t + 1) * self.epsilon_decay))) | |
| def preprocess_state(self, state): | |
| return np.reshape(state, [1, 4]) | |
| def replay(self, batch_size): | |
| x_batch, y_batch = [], [] | |
| minibatch = random.sample( | |
| self.memory, min(len(self.memory), batch_size)) | |
| for state, action, reward, next_state, done in minibatch: | |
| y_target = self.model.predict(state) | |
| y_target[0][action] = reward if done else reward + self.gamma * np.max(self.model.predict(next_state)[0]) | |
| x_batch.append(state[0]) | |
| y_batch.append(y_target[0]) | |
| self.model.fit(np.array(x_batch), np.array(y_batch), batch_size=len(x_batch), verbose=0) | |
| if self.epsilon > self.epsilon_min: | |
| self.epsilon *= self.epsilon_decay | |
| def run(self): | |
| scores = deque(maxlen=100) | |
| for e in range(self.n_episodes): | |
| state = self.preprocess_state(self.env.reset()) | |
| done = False | |
| i = 0 | |
| while not done: | |
| action = self.choose_action(state, self.get_epsilon(e)) | |
| next_state, reward, done, _ = self.env.step(action) | |
| next_state = self.preprocess_state(next_state) | |
| self.remember(state, action, reward, next_state, done) | |
| state = next_state | |
| i += 1 | |
| scores.append(i) | |
| mean_score = np.mean(scores) | |
| if mean_score >= self.n_win_ticks and e >= 100: | |
| if not self.quiet: print('Ran {} episodes. Solved after {} trials ✔'.format(e, e - 100)) | |
| return e - 100 | |
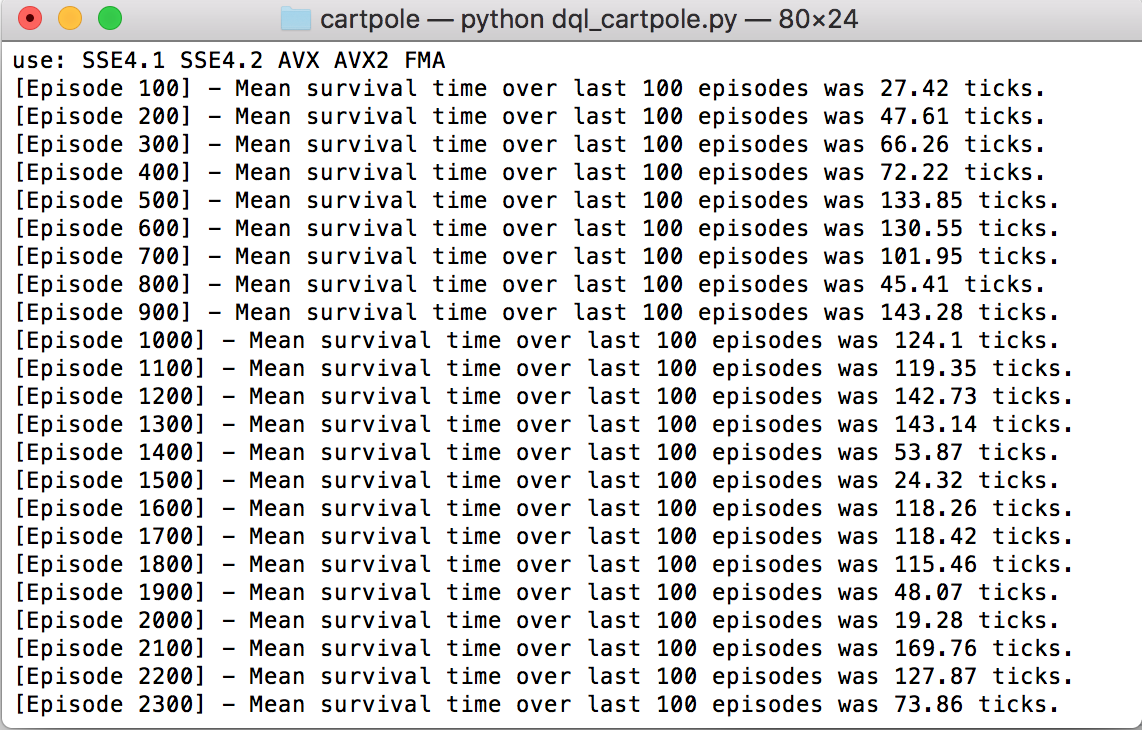
| if e % 100 == 0 and not self.quiet: | |
| print('[Episode {}] - Mean survival time over last 100 episodes was {} ticks.'.format(e, mean_score)) | |
| self.replay(self.batch_size) | |
| if not self.quiet: print('Did not solve after {} episodes 😞'.format(e)) | |
| return e | |
| if __name__ == '__main__': | |
| agent = DQNCartPoleSolver() | |
| agent.run() |
When I ran it locally it took around 1000 episodes to solve. tensorflow-gpu==1.4.1, python 3.6.0.
I ran this locally as well, and it has never succeeded in under 1000 episodes. The code is solid, and the method looks great. Overall, it's a great project. I just don't think that this should be #1 on the leaderboard of best CartPole-v0 performances.
@gstenger98 but nevertheless it was able to solve it in 85 episodes according to https://github.com/openai/gym/wiki/Leaderboard#cartpole-v0. And I believe that the matter is in versions of libraries you use while trying to reproduce the results.
@gstenger98 also I noticed that it's a bit unstable, sometimes NN can find the right weights in < 500 episodes, and sometimes it can learn just nothing in >= 1000 episodes - I had the case when there wasn't any reward greater than 25 through all 1000 episodes.
Perhaps it's unstable because it is not using target networks?
I ran this programme got did not solve after 999 episodes.
I also could not get this to solve after 999 episode, despite running this several times. For it to be on the leader board does it just have to solve it once in x amount of episodes?
Perhaps they need to run it 5, or even 30 times and only use the mean number of episodes that it taeks to solve. This would give an estimate that was an overestimate about half the time and an under-estimate about half the time. An even better way to do scoring would be to run it 300 times, and report the 5th and 95th percentiles of the number of epochs to solve along with the mean. One would expect performance outside of the window only about 10% of the time. If you look at tasks like visual feature recognition the evaluation is now in the 1% or the 5%, so the extremal score is meaningful when the expectation is not. As ML and AI get better I would expect more distance into extremal as measures of performance.
In the code it says: 'Mean survival time over last 100 episodes was ...', however I see in the code that the mean is taken over all the scores. Is that correct?
Or is that how deque works?
@SanDramaa Yes, that’s how deque works. It can only hold max length of 100 specified.
When I run this script I am getting 'Did not solve after 999 episodes'. I have tried using TensorFlow 1.3 and 1.4.1 using Python 3.6.3. Any suggestions why I am not getting the results you are seeing?