We want to integrate the probability density function for normal distribution:
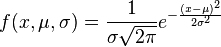
To simplify the problem, let's pick mean = 0.0, standard deviation = 1.0. In theory, integration of this fuction from x = -oo to x = oo should give P = 1.0.

- CAPD4 gives a very good approximation
[0.999, 1.0]when we integrate the function from x = -10 to x = 10. - However, when we integrate the function from x = -20, to x = 20. It gives not a good approximation
[-2.70522851366e+33,2.70522851366e+33]. I believe that this is due to the time-step control. - When we manually specify the time step as
0.001, it gives a better answer[0.999999999998,1.00000000001]
The following is the C++ code that we used. Please note that line 52 (solver.setStep(0.001);) is commented out.
/////////////////////////////////////////////////////////////////////////////
//
/// @file encloseTrajectoryBetweenTimeSteps.cpp
///
/// @author Daniel Wilczak
//
/////////////////////////////////////////////////////////////////////////////
// Copyright (C) CAPD group
//
// This file constitutes a part of the CAPD library,
// distributed under the terms of the GNU General Public License.
// Consult http://capd.ii.uj.edu.pl/ for details.
#include <string>
#include <iostream>
#include "capd/capdlib.h"
using namespace capd;
using namespace std;
int main() {
try {
cout.precision(12);
string capd_str = "var:x_0, P_0;"
"fun:1.0,"
"(1.0/(6.283185307180000123139507195447^(0.5))*exp(((-1)*(x_0^2))/2));";
IMap vectorField(capd_str);
IOdeSolver solver(vectorField, 20);
ITimeMap timeMap(solver);
// This is our initial condition
IVector x(2);
// {[-20,-20],[0,0]
x[0] = -20;
x[1] = 0;
// define a doubleton representation of the interval vector x
C0Rect2Set s(x);
// Here we start to integrate. The time of integration is set to T=5.
double T = 40;
timeMap.stopAfterStep(true);
interval prevTime(0.);
cout << "Initial: " << x;
do {
// solver.setStep(0.001);
timeMap(T, s);
interval stepMade = solver.getStep();
cout << "\nstep made: " << stepMade;
// This is how we can extract an information
// about the trajectory between time steps.
// The type CurveType is a function defined
// on the interval [0,stepMade].
// It can be evaluated at a point (or interval).
// The curve can be also differentiated wrt to time.
// We can also extract from it the 1-st order derivatives wrt.
const IOdeSolver::SolutionCurve& curve = solver.getCurve();
interval domain = interval(0, 1) * stepMade;
// Here we use a uniform grid of last time step made
// to enclose the trajectory between time steps.
// You can use your own favorite subdivision, perhaps nonuniform,
// depending on the problem you want to solve.
int grid = 2;
for (int i = 0; i < grid; ++i) {
interval subsetOfDomain = interval(i, i + 1) * stepMade / grid;
// The above interval does not need to be a subset of domain.
// This is due to rounding to floating point numbers.
// We take the intersection with the domain.
intersection(domain, subsetOfDomain, subsetOfDomain);
// Here we evaluated curve at the interval subsetOfDomain.
// v will contain rigorous bound for the trajectory for this time interval.
IVector v = curve(subsetOfDomain);
std::cout << "\nenclosure for t=" << prevTime + subsetOfDomain << ": " << v;
std::cout << "\ndiam(enclosure): " << diam(v);
}
prevTime = timeMap.getCurrentTime();
cout << "\ncurrent time: " << prevTime << endl << endl;
} while (!timeMap.completed());
} catch(exception& e) {
cout << "\n\nException caught!\n" << e.what() << endl << endl;
}
} // END