Last active
March 23, 2023 02:44
-
-
Save terjehaukaas/74c37c2d1d1716e775e06a7933732203 to your computer and use it in GitHub Desktop.
MDOF Dynamic Analysis
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| # ------------------------------------------------------------------------ | |
| # The following Python code is implemented by Professor Terje Haukaas at | |
| # the University of British Columbia in Vancouver, Canada. It is made | |
| # freely available online at terje.civil.ubc.ca together with notes, | |
| # examples, and additional Python code. Please be cautious when using | |
| # this code; it may contain bugs and comes without warranty of any form. | |
| # Please see the Programming note for how to get started, and notice | |
| # that you must copy certain functions into the file terjesfunctions.py | |
| # Also notice that for this particular code you need the file | |
| # ElCentroGroundMotion.txt, which is posted nearby. | |
| # ------------------------------------------------------------------------ | |
| import numpy as np | |
| import matplotlib.pyplot as plt | |
| import terjesfunctions as fcns | |
| # ------------------------------------------------------------------------ | |
| # INPUT [N, m, s, kg] | |
| # ------------------------------------------------------------------------ | |
| # Constants | |
| E = 2.0e+11 | |
| I = 8.09e-5 | |
| A = 0.0091 | |
| M = 400.0 | |
| storeyHeight = 4.0 | |
| bayWidth = 6.0 | |
| # Nodes (x, y) | |
| nodes = np.array([(0.0, 0.0), | |
| (bayWidth, 0.0), | |
| (2.0*bayWidth, 0.0), | |
| (0.0, storeyHeight), | |
| (bayWidth, storeyHeight), | |
| (2.0*bayWidth, storeyHeight), | |
| (0.0, 2.0*storeyHeight), | |
| (bayWidth, 2.0*storeyHeight), | |
| (2.0*bayWidth, 2.0*storeyHeight)]) | |
| # Frame elements (node1, node2, E, I, A) | |
| frameElements = np.array([(1, 4, E, I, A), | |
| (2, 5, E, I, A), | |
| (3, 6, E, I, A), | |
| (4, 5, E, I, A), | |
| (5, 6, E, I, A), | |
| (4, 7, E, I, A), | |
| (5, 8, E, I, A), | |
| (6, 9, E, I, A), | |
| (7, 8, E, I, A), | |
| (8, 9, E, I, A)]) | |
| # Mass (node, value, dof) | |
| mass = np.array([(4, M, 1), | |
| (5, M, 1), | |
| (6, M, 1), | |
| (7, M, 1), | |
| (8, M, 1), | |
| (9, M, 1)]) | |
| # Boundary conditions (node, 0=free, 1=fixed) | |
| constraints = np.array([(1, 1, 1, 1), | |
| (2, 1, 1, 1), | |
| (3, 1, 1, 1)]) | |
| # ------------------------------------------------------------------------ | |
| # ASSEMBLE THE STIFFNESS MATRIX Ka | |
| # ------------------------------------------------------------------------ | |
| # Number of DOFs | |
| numDOFsPerNodeInStructure = 3 | |
| numNodes = nodes.shape[0] | |
| totalNumDOFs = numDOFsPerNodeInStructure * numNodes | |
| # Count elements | |
| numFrameElements = frameElements.shape[0] | |
| # Initialize the big stiffness matrix | |
| Ka = np.zeros((totalNumDOFs, totalNumDOFs)) | |
| # Assemble frame elements | |
| KlStorageFrame = [] | |
| TlgStorageFrame = [] | |
| for i in range(numFrameElements): | |
| # Information about element | |
| E = frameElements[i, 2] | |
| I = frameElements[i, 3] | |
| A = frameElements[i, 4] | |
| # Information about nodes | |
| node1 = int(frameElements[i, 0]) | |
| node2 = int(frameElements[i, 1]) | |
| nodeList = np.array([node1, node2]) | |
| nodalcoords = np.array([nodes[node1-1, 0], nodes[node1-1, 1], nodes[node2-1, 0], nodes[node2-1, 1]]) | |
| # Element length and orientation | |
| delta_x = nodalcoords[2] - nodalcoords[0] | |
| delta_y = nodalcoords[3] - nodalcoords[1] | |
| L = np.sqrt(delta_x ** 2 + delta_y ** 2) | |
| # Get Kl and Tlg | |
| nu = 0 | |
| beta = 0 | |
| [Kl, Kgeometric, Tlg] = fcns.getFrameStiffness2D(E, nu, I, A, beta, L, delta_x, delta_y, 0) | |
| KlStorageFrame.append(Kl) | |
| TlgStorageFrame.append(Tlg) | |
| # Calculate Kg = Tlg^T * Kl * Tlg | |
| Kg = (np.transpose(Tlg).dot(Kl)).dot(Tlg) | |
| # Assemble | |
| numDOFsPerNodeInElement = 3 | |
| Ka = fcns.assembleStiffnessMatrix(Ka, Kg, nodeList, numDOFsPerNodeInElement, numDOFsPerNodeInStructure) | |
| # ------------------------------------------------------------------------ | |
| # ASSEMBLE MASS MATRIX | |
| # ------------------------------------------------------------------------ | |
| # Add the mass to DOF 1 and 2 of the node, not the rotational DOF | |
| Ma = np.zeros((totalNumDOFs, totalNumDOFs)) | |
| numMasses = mass.shape[0] | |
| for i in range(numMasses): | |
| dof = int((mass[i, 0]-1)*numDOFsPerNodeInStructure + mass[i, 2] - 1) | |
| Ma[dof, dof] = mass[i, 1] | |
| # ------------------------------------------------------------------------ | |
| # INTRODUCE BOUNDARY CONDITIONS & LOCK ZERO-STIFFNESS DOFs | |
| # ------------------------------------------------------------------------ | |
| # DOFs locked by input | |
| dofStatus = np.zeros(totalNumDOFs) | |
| nfix = constraints.shape[0] | |
| for k in range(nfix): | |
| fixedNode = int(constraints[k, 0]) | |
| for m in range(numDOFsPerNodeInStructure): | |
| if constraints[k, m + 1] == 1: | |
| dofStatus[(fixedNode - 1) * numDOFsPerNodeInStructure + m] = 1 | |
| # DOFs without stiffness | |
| for i in range(totalNumDOFs): | |
| if Ka[i, i] == 0: | |
| dofStatus[i] = 1 | |
| numFreeDOFs = int(totalNumDOFs - np.sum(dofStatus)) | |
| Kf = np.zeros((numFreeDOFs, numFreeDOFs)) | |
| Mf = np.zeros((numFreeDOFs, numFreeDOFs)) | |
| iota = np.zeros(numFreeDOFs) | |
| iCounter = 0 | |
| jCounter = 0 | |
| for i in range(totalNumDOFs): | |
| if dofStatus[i] == 0: | |
| jCounter = 0 | |
| for j in range(i + 1): | |
| if dofStatus[j] == 0: | |
| Kf[iCounter, jCounter] = Ka[i, j] | |
| Kf[jCounter, iCounter] = Ka[i, j] | |
| jCounter += 1 | |
| Mf[iCounter, iCounter] = Ma[i, i] | |
| iota[iCounter] = Ma[i, i] | |
| iCounter += 1 | |
| # ------------------------------------------------------------------------ | |
| # EIGENVALUE ANALYSIS | |
| # ------------------------------------------------------------------------ | |
| # Here we need scipy, to solve the *generalized* eigenvalue problem [K-omega^2*M]{u} = 0 | |
| import scipy | |
| # Determine eigenvalues, which are gamma = omega^2 | |
| allEigenvalues = scipy.linalg.eigvals(Kf, Mf) | |
| # Sort them | |
| sortedEigenvalues = np.sort(allEigenvalues) | |
| # Check them | |
| eigenvalues = [] | |
| for i in range(len(sortedEigenvalues)): | |
| if sortedEigenvalues[i].real == np.inf: | |
| # Remove infinite eigenvalues (zero mass DOFs) | |
| pass | |
| else: | |
| eigenvalues.append(sortedEigenvalues[i].real) | |
| # Calculate corresponding frequencies and periods | |
| numEigenvalues = len(eigenvalues) | |
| naturalFrequencies = [] | |
| naturalPeriods = [] | |
| print('\n'"Found the following", numEigenvalues, "eigenvalues:"'\n') | |
| for i in range(numEigenvalues): | |
| frequency = np.sqrt(eigenvalues[i]) | |
| naturalFrequencies.append(frequency) | |
| period = 2*np.pi/frequency | |
| naturalPeriods.append(period) | |
| print(" Frequency: %.2frad, Period: %.3fsec" % (frequency, period)) | |
| # ------------------------------------------------------------------------ | |
| # SET RAYLEIGH DAMPING MATRIX | |
| # ------------------------------------------------------------------------ | |
| # Set target damping ratio | |
| targetDampingRatio = 0.05 | |
| # Enforce that damping on the first two modes | |
| omega1 = naturalFrequencies[0] | |
| omega2 = naturalFrequencies[1] | |
| # Calculate alpha and beta in C = alpha*M + beta*K | |
| factor = 2 * targetDampingRatio / (omega1 + omega2) | |
| alpha = omega1 * omega2 * factor | |
| beta = factor | |
| # Create the damping matrix | |
| Cf = np.multiply(Mf, alpha) + np.multiply(Kf, beta) | |
| # Calculate the damping ratio at the different periods | |
| dampingRatios = [] | |
| for i in range(numEigenvalues): | |
| dampingRatios.append(alpha / (2 * naturalFrequencies[i]) + beta * naturalFrequencies[i] / 2) | |
| # Plot those damping ratios | |
| plt.ion() | |
| fig = plt.figure(1) | |
| plt.title("Damping Ratio at Different Natural Periods") | |
| plt.plot(naturalPeriods, dampingRatios, 'ks-', label='Actual damping') | |
| plt.plot([naturalPeriods[0], naturalPeriods[-1]], [targetDampingRatio, targetDampingRatio], 'rs-', label='Target damping') | |
| plt.legend() | |
| plt.xlabel("Period [sec]") | |
| plt.ylabel("Damping Ratio") | |
| print('\n'"Press any key to continue...") | |
| plt.waitforbuttonpress() | |
| # ------------------------------------------------------------------------ | |
| # READ GROUND MOTION [Unit of g] | |
| # ------------------------------------------------------------------------ | |
| # Load the El Centro ground motion record | |
| groundAcceleration = [] | |
| f = open("ElCentroGroundMotion.txt", "r") | |
| lines = f.readlines() | |
| for oneline in lines: | |
| splitline = oneline.split() | |
| for j in range(len(splitline)): | |
| value = 9.81 * float(splitline[j]) | |
| groundAcceleration.append(value) | |
| # Output | |
| print('\n'"Max ground acceleration in units of g:", np.max(np.abs(groundAcceleration)) / 9.81) | |
| # Create time axis | |
| numTimePoints = len(groundAcceleration) | |
| delta_t = 0.02 | |
| t = np.linspace(0, delta_t*numTimePoints, numTimePoints) | |
| # Plot the ground motion | |
| plt.ion() | |
| fig = plt.figure(2) | |
| plt.title("El Centro Ground Motion") | |
| plt.plot(t, groundAcceleration, 'k-') | |
| plt.xlabel("Time [sec]") | |
| plt.ylabel("Ground Acceleration [m/s^2]") | |
| print('\n'"Press any key to continue...") | |
| plt.waitforbuttonpress() | |
| # ------------------------------------------------------------------------ | |
| # INITIALIZE PLOT | |
| # ------------------------------------------------------------------------ | |
| # Initial declarations | |
| Pplus1 = np.zeros(numFreeDOFs) | |
| displacement = np.zeros(numFreeDOFs) | |
| velocity = np.zeros(numFreeDOFs) | |
| acceleration = np.zeros(numFreeDOFs) | |
| # Initialize plot | |
| plt.ion() | |
| fig = plt.figure(3) | |
| plt.autoscale(True) | |
| # Find outer plot limits | |
| xmin = 0.0 | |
| xmax = 0.0 | |
| ymin = 0.0 | |
| ymax = 0.0 | |
| for i in range(numNodes): | |
| if nodes[i, 0] < xmin: | |
| xmin = nodes[i, 0] | |
| elif nodes[i, 0] > xmax: | |
| xmax = nodes[i, 0] | |
| elif nodes[i, 1] < ymin: | |
| ymin = nodes[i, 1] | |
| elif nodes[i, 1] > ymax: | |
| ymax = nodes[i, 1] | |
| xmin = xmin - (xmax - xmin) * 0.3 | |
| ymin = ymin - (ymax - ymin) * 0.3 | |
| xmax = xmax + (xmax - xmin) * 0.3 | |
| ymax = ymax + (ymax - ymin) * 0.3 | |
| # Make the plotting area square | |
| xrange = xmax - xmin | |
| yrange = ymax - ymin | |
| if xrange > yrange: | |
| ymin -= 0.5 * (xrange - yrange) | |
| ymax += 0.5 * (xrange - yrange) | |
| else: | |
| xmin -= 0.5 * (yrange - xrange) | |
| xmax += 0.5 * (yrange - xrange) | |
| # ------------------------------------------------------------------------ | |
| # MDOF NEWMARK ALGORITHM | |
| # ------------------------------------------------------------------------ | |
| # Newmark parameters (0.167<beta<0.25) (gamma=0.5) | |
| newmarkBeta = 0.25 | |
| newmarkGamma = 0.5 | |
| # Newmark constants | |
| a1 = 1.0 / (newmarkBeta * delta_t**2) | |
| a2 = -1.0 / (newmarkBeta * delta_t**2) | |
| a3 = -1.0 / (newmarkBeta * delta_t) | |
| a4 = (1.0 - 1.0 / (2.0 * newmarkBeta)) | |
| a5 = newmarkGamma / (newmarkBeta * delta_t) | |
| a6 = -newmarkGamma / (newmarkBeta * delta_t) | |
| a7 = (1.0 - newmarkGamma / newmarkBeta) | |
| a8 = delta_t * (1.0 - newmarkGamma / (2.0 * newmarkBeta)) | |
| # Track max displacement | |
| uMax = 0 | |
| # Start the loop | |
| for step in range(numTimePoints): | |
| # Keep track of time | |
| time = step * delta_t | |
| # Set the external force vector | |
| Pplus1 = np.multiply(iota, groundAcceleration[step]) | |
| # Establish the system of equations using the Newmark constants | |
| newDispFactor = np.multiply(a1, Mf) + np.multiply(a5, Cf) | |
| accelFactor = np.multiply(a4, Mf) + np.multiply(a8, Cf) | |
| velocFactor = np.multiply(a3, Mf) + np.multiply(a7, Cf) | |
| dispFactor = np.multiply(a2, Mf) + np.multiply(a6, Cf) | |
| Kefficient = newDispFactor + Kf | |
| Fplus1 = Pplus1 - accelFactor.dot(acceleration) - velocFactor.dot(velocity) - dispFactor.dot(displacement) | |
| # Solve the system of equilibrium equations | |
| uPlus1 = np.linalg.solve(Kefficient, Fplus1) | |
| # Maximum displacement | |
| uaMax = np.max(np.abs(uPlus1)) | |
| if uaMax > uMax: | |
| uMax = uaMax | |
| # Determine increment in displacement | |
| delu = uPlus1 - displacement | |
| # Determine acceleration at time step i+1 | |
| accelerationPlus1 = np.multiply(a1, delu) + np.multiply(a3, velocity) + np.multiply(a4, acceleration) | |
| # Determine velocity at time step i+1 | |
| velocityPlus1 = np.multiply(a5, delu) + np.multiply(a7, velocity) + np.multiply(a8, acceleration) | |
| # Set response values at time step i equal to response at time step i+1 | |
| displacement = uPlus1 | |
| velocity = velocityPlus1 | |
| acceleration = accelerationPlus1 | |
| # Get ua by adding zeros to the array | |
| ua = np.zeros(totalNumDOFs) | |
| iCounter = 0 | |
| for i in range(totalNumDOFs): | |
| if dofStatus[i] == 0: | |
| ua[i] = displacement[iCounter] | |
| iCounter += 1 | |
| # Clear previous lines from plot | |
| plt.cla() | |
| # Set scale factor | |
| scale_factor = 500 | |
| # Get coordinates of displaced nodes | |
| xcoord = np.zeros(2) | |
| ycoord = np.zeros(2) | |
| for i in range(numFrameElements): | |
| node1 = int(frameElements[i, 0]) | |
| node2 = int(frameElements[i, 1]) | |
| xcoord[0] = nodes[node1 - 1, 0] + ua[(node1 - 1) * numDOFsPerNodeInStructure + 0] * scale_factor | |
| ycoord[0] = nodes[node1 - 1, 1] + ua[(node1 - 1) * numDOFsPerNodeInStructure + 1] * scale_factor | |
| xcoord[1] = nodes[node2 - 1, 0] + ua[(node2 - 1) * numDOFsPerNodeInStructure + 0] * scale_factor | |
| ycoord[1] = nodes[node2 - 1, 1] + ua[(node2 - 1) * numDOFsPerNodeInStructure + 1] * scale_factor | |
| # Plot each line segment | |
| plt.plot(xcoord, ycoord, 'ks-') | |
| # Polish and hold plot | |
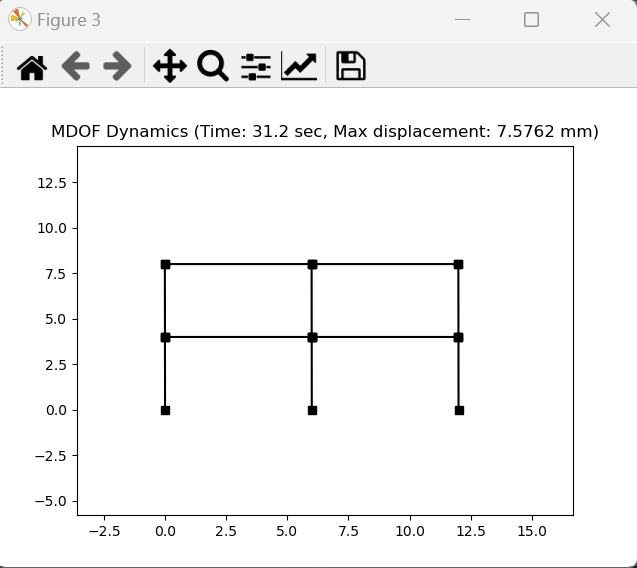
| plt.title("MDOF Dynamics (Time: %.1f sec, Max displacement: %.4f mm)" % (time, 1000*uMax)) | |
| plt.axis([xmin, xmax, ymin, ymax]) | |
| plt.pause(0.0001) | |
| # Hold the plot a few seconds at the very end | |
| print('\n'"Press any key to continue...") | |
| plt.waitforbuttonpress() |
Dear Professor Haukaas
Thank you very much for your code!
I'm facing a problem when I try to run the code.
The third figure doesn't plot a displaced shape of the frame and also glitches a long time while plotting.
The title also prints a total duration of the ground motion instead of the corresponding time of maximum displacement (as in your screenshot).
Can you suggest where can be a mistake?
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
Hello, thank you for this code, i want to help me please.
NameError: name 'fcns' is not defined
How can i fix it @terjehaukaas