-
-
Save trygvebw/c71334dd127d537a15e9d59790f7f5e1 to your computer and use it in GitHub Desktop.
| import torch | |
| import numpy as np | |
| import k_diffusion as K | |
| from PIL import Image | |
| from torch import autocast | |
| from einops import rearrange, repeat | |
| def pil_img_to_torch(pil_img, half=False): | |
| image = np.array(pil_img).astype(np.float32) / 255.0 | |
| image = rearrange(torch.from_numpy(image), 'h w c -> c h w') | |
| if half: | |
| image = image.half() | |
| return (2.0 * image - 1.0).unsqueeze(0) | |
| def pil_img_to_latent(model, img, batch_size=1, device='cuda', half=True): | |
| init_image = pil_img_to_torch(img, half=half).to(device) | |
| init_image = repeat(init_image, '1 ... -> b ...', b=batch_size) | |
| if half: | |
| return model.get_first_stage_encoding(model.encode_first_stage(init_image.half())) | |
| return model.get_first_stage_encoding(model.encode_first_stage(init_image)) | |
| def find_noise_for_image(model, img, prompt, steps=200, cond_scale=0.0, verbose=False, normalize=True): | |
| x = pil_img_to_latent(img, batch_size=1, device='cuda', half=True) | |
| with torch.no_grad(): | |
| with autocast('cuda'): | |
| uncond = model.get_learned_conditioning(['']) | |
| cond = model.get_learned_conditioning([prompt]) | |
| s_in = x.new_ones([x.shape[0]]) | |
| dnw = K.external.CompVisDenoiser(model) | |
| sigmas = dnw.get_sigmas(steps).flip(0) | |
| if verbose: | |
| print(sigmas) | |
| with torch.no_grad(): | |
| with autocast('cuda'): | |
| for i in trange(1, len(sigmas)): | |
| x_in = torch.cat([x] * 2) | |
| sigma_in = torch.cat([sigmas[i - 1] * s_in] * 2) | |
| cond_in = torch.cat([uncond, cond]) | |
| c_out, c_in = [K.utils.append_dims(k, x_in.ndim) for k in dnw.get_scalings(sigma_in)] | |
| if i == 1: | |
| t = dnw.sigma_to_t(torch.cat([sigmas[i] * s_in] * 2)) | |
| else: | |
| t = dnw.sigma_to_t(sigma_in) | |
| eps = model.apply_model(x_in * c_in, t, cond=cond_in) | |
| denoised_uncond, denoised_cond = (x_in + eps * c_out).chunk(2) | |
| denoised = denoised_uncond + (denoised_cond - denoised_uncond) * cond_scale | |
| if i == 1: | |
| d = (x - denoised) / (2 * sigmas[i]) | |
| else: | |
| d = (x - denoised) / sigmas[i - 1] | |
| dt = sigmas[i] - sigmas[i - 1] | |
| x = x + d * dt | |
| if normalize: | |
| return (x / x.std()) * sigmas[-1] | |
| else: | |
| return x |
What is the k_diffusion library you are using for this? Can I get a github or pypi?
It's an alternative sampler
What is the k_diffusion library you are using for this? Can I get a github or pypi?
It's an alternative sampler
Thanks a lot.
is there a diffusers compatible version?
Got it working. Thank you for this! Getting amazing results now!
how do you use this code / where do you put it in the stable diffusion folder?
how do you use this code / where do you put it in the stable diffusion folder?
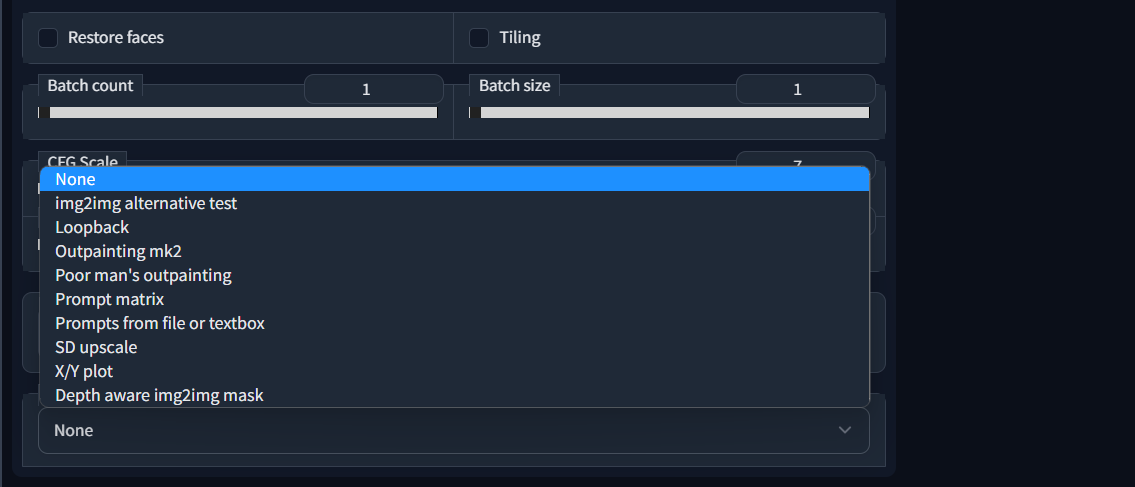
I think you need to copy the code into a .py file and copy that .py file into /scripts in the automatic1111 root. Then it should show up in the "Scripts" dropdown in the web ui
how do you use this code / where do you put it in the stable diffusion folder?
I think you need to copy the code into a .py file and copy that .py file into /scripts in the automatic1111 root. Then it should show up in the "Scripts" dropdown in the web ui
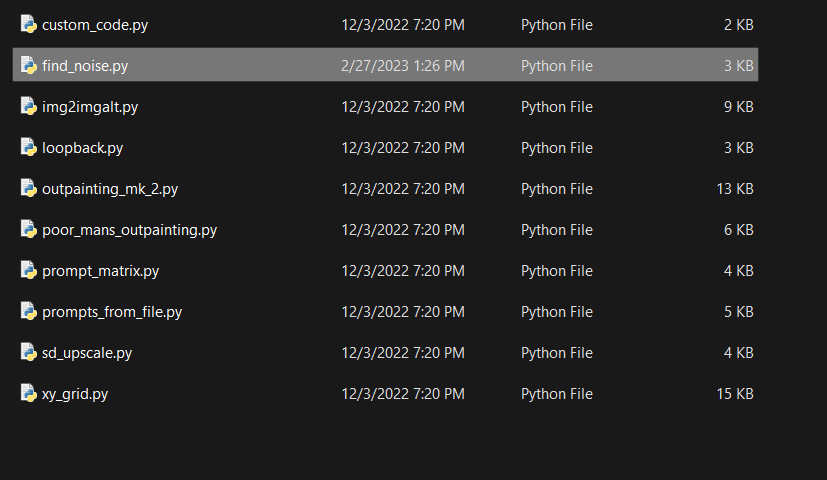
thank you for replying! I did this method but I don't see it in the "Scripts" dropdown in the web ui. It's supposed to be in "C:\Users\user\AI\stable-diffusion-webui\scripts" right?
Hi, I am getting a run time error saying : "RuntimeError: Input type (c10::Half) and bias type (float) should be the same". Anyone else getting the same error? Not so sure how I can fix this.
Would you be able to update this for the SDXL 1.0 base model?
Can this work in ComfyUI?
What is the k_diffusion library you are using for this? Can I get a github or pypi?