I have already mentioned the differences between Cadair's and Eric's implementation in this comment. Please note the differences mentioned for Eric's implementation are actually not present. Eric has confirmed it here. When I read through Eric's implementation it became clear that Eric's code is actually following the paper exactly. As far as Cadair's code is comnsidered it has some differences, which I rectified. Now both the implementation follow the paper. But there were still differences which could be spotted.
if weights is None:
weights = np.ones(len(sigma))
# 1. Replace spurious negative pixels with zero
data[data <= 0] = 1e-15 # Makes sure that all values are above zero
image = np.empty(data.shape, dtype=data.dtype)
conv = np.empty(data.shape, dtype=data.dtype)
sigmaw = np.empty(data.shape, dtype=data.dtype)
for s, weight in zip(sigma, weights):
# 2 & 3 Create kernel and convolve with image
ndimage.filters.gaussian_filter(data, sigma=s,
truncate=truncate, mode='nearest', output=conv)
# 5. Calculate difference between image and the local mean image,
# square the difference, and convolve with kernel. Square-root the
# resulting image to give ‘local standard deviation’ image sigmaw
conv = data - conv
ndimage.filters.gaussian_filter(conv ** 2, sigma=s,
truncate=truncate, mode='nearest', output=sigmaw)
np.sqrt(sigmaw, out=sigmaw)
conv /= sigmaw
# 6. Apply arctan transformation on Ci to give C'i
conv *= k
np.arctan(conv, out=conv)
conv *= weight
image += conv
# delete these arrays here as it reduces the total memory consumption when
# we create the Cprime_g temp array below.
del conv
del sigmaw
# 8. Take weighted mean of C'i to give a weighted mean locally normalised
# image.
image /= len(sigma)
# 9. Calculate global gamma-transformed image C'g
data_min = data.min()
data_max = data.max()
Cprime_g = (data - data_min)
Cprime_g /= (data_max - data_min)
Cprime_g **= (1/gamma)
Cprime_g *= h
image *= (1 - h)
image += Cprime_g
return imageThere were no changes made to Eric's code.
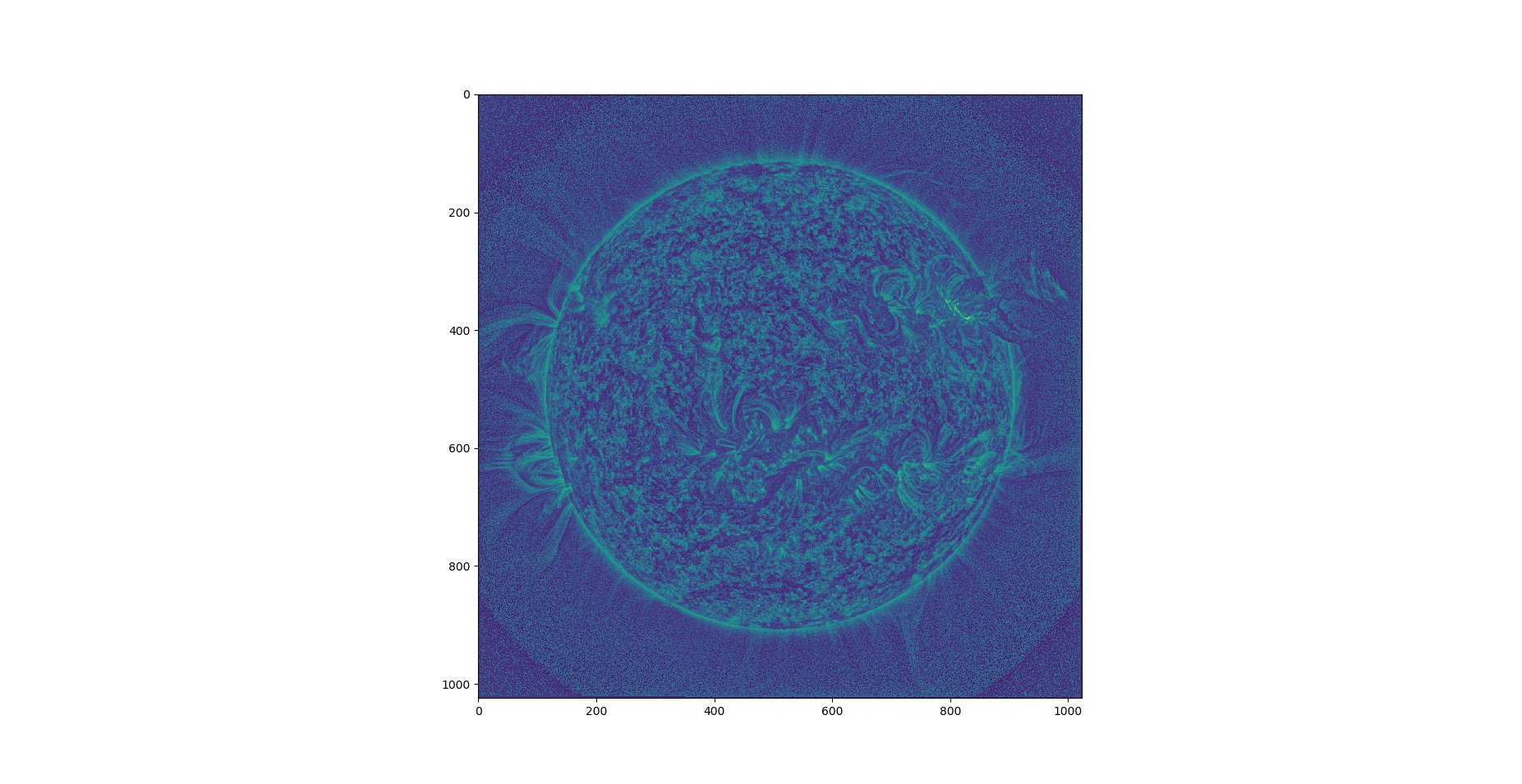
Raw Matplotlib Output
Cadair's Output
Eric's Output
 Sunpy Map Output
Sunpy Map Output
Cadair's Output
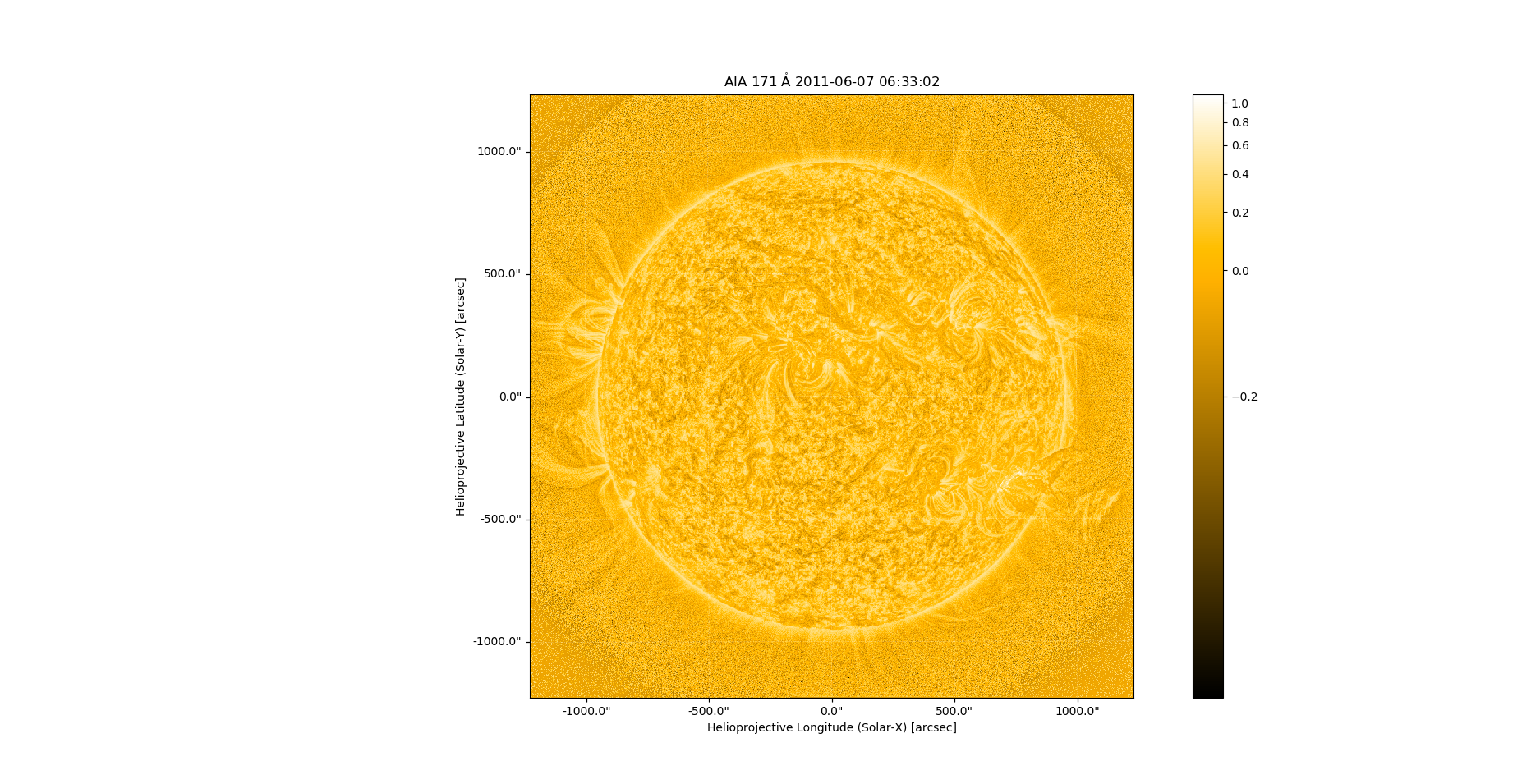
Eric's Output
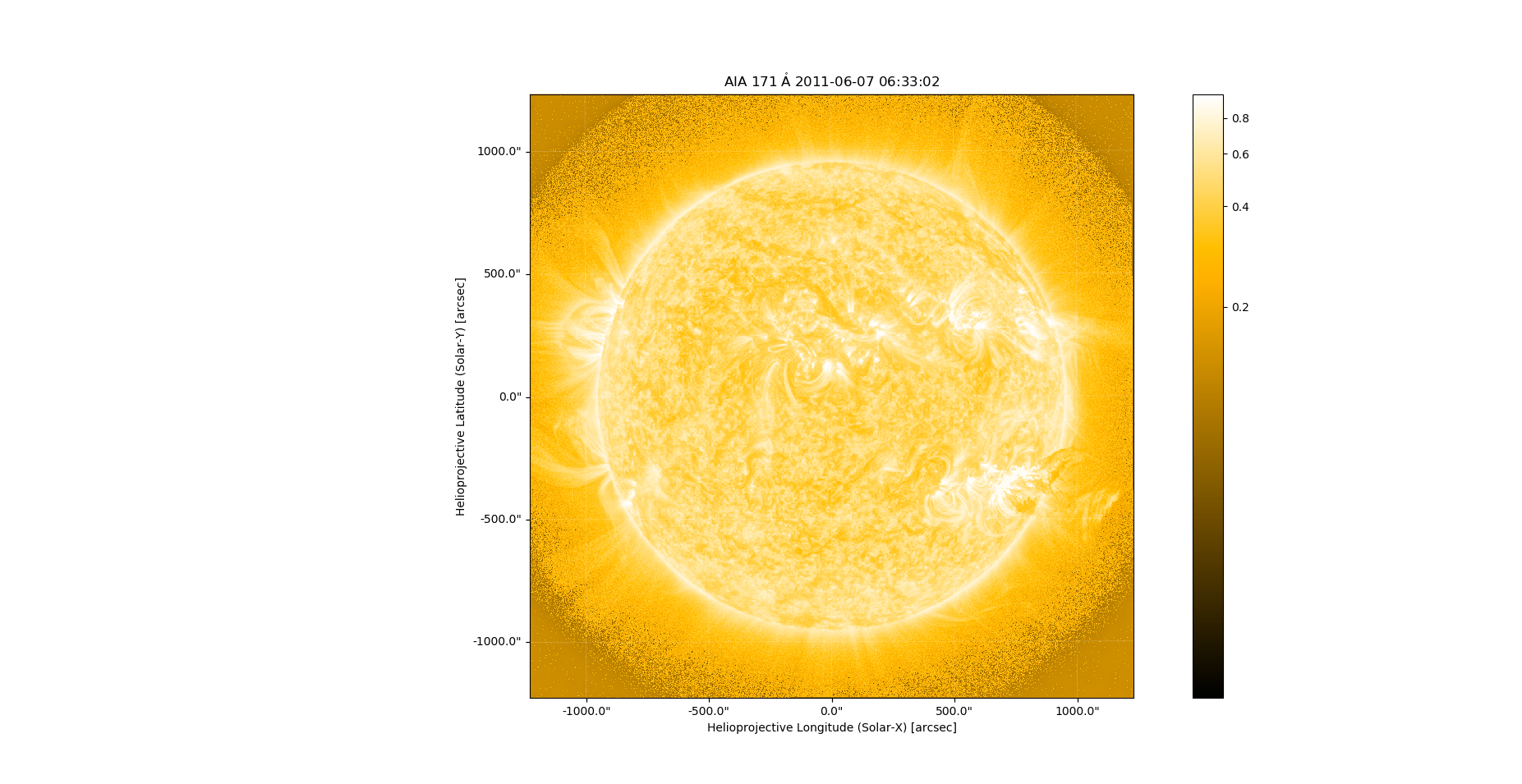
By visual inspection, it is clear that both the implementation are giving more or less the same result. Though it should be noted that the rectified Cadair's implementation show the structures in greater detail as the contrast is much better. Both the implementation are very similar and outputs too.