-
-
Save veproza/7ce92724d0ee13c48cc3 to your computer and use it in GitHub Desktop.
| // Based on MPU-6050 Short Example Sketch | |
| // By Arduino User JohnChi | |
| // August 17, 2014 | |
| // Public Domain | |
| #include <Wire.h> | |
| #include <TimerOne.h> | |
| #include <SD.h> | |
| #include <SPI.h> | |
| #define bufferLength 128 | |
| const int MPU=0x68; // I2C address of the MPU-6050 | |
| int second = floor(millis() / 1000); | |
| File myFile; | |
| volatile byte buf1[bufferLength]; | |
| volatile byte buf2[bufferLength]; | |
| byte toSend[bufferLength]; | |
| volatile uint8_t counter1; | |
| volatile uint8_t counter2; | |
| volatile bool secondBuffer = false; | |
| void setup(){ | |
| Wire.begin(); | |
| Wire.beginTransmission(MPU); | |
| Wire.write(0x6B); // PWR_MGMT_1 register | |
| Wire.write(0); // set to zero (wakes up the MPU-6050) | |
| Wire.endTransmission(true); | |
| Serial.begin(116400); | |
| while (!Serial) {} | |
| pinMode(10, OUTPUT); | |
| if (!SD.begin(10)) { | |
| Serial.println("initialization failed!"); | |
| return; | |
| } | |
| myFile = SD.open("test.txt", FILE_WRITE); | |
| Serial.println("All OK, wait 5s, then GO TIME"); | |
| delay(5000); | |
| Serial.print("GO"); | |
| Timer1.initialize(1000); | |
| Timer1.attachInterrupt(readData); | |
| } | |
| bool dead = false; | |
| volatile uint8_t fucks = 0; | |
| void loop() { | |
| second = floor(millis() / 1000); | |
| if(dead) { | |
| return; | |
| } | |
| if(second > 60 || fucks > 5) { | |
| if(!dead) { | |
| Serial.println("END"); | |
| Serial.println(fucks); | |
| myFile.close(); | |
| Serial.println("Closed"); | |
| dead = true; | |
| } | |
| return; | |
| } | |
| if(counter1 >= bufferLength or counter2 >= bufferLength) { | |
| noInterrupts(); | |
| if(counter1 >= bufferLength) { | |
| memcpy((char*)toSend, (char*)buf1, bufferLength); | |
| counter1 = 0; | |
| } else { | |
| memcpy((char*)toSend, (char*)buf2, bufferLength); | |
| counter2 = 0; | |
| } | |
| interrupts(); | |
| myFile.write(toSend,bufferLength); | |
| } | |
| } | |
| void readData(){ | |
| interrupts(); | |
| Wire.beginTransmission(MPU); | |
| Wire.write(0x3B); // starting with register 0x3B (ACCEL_XOUT_H) | |
| Wire.endTransmission(false); | |
| Wire.requestFrom(MPU,2,true); | |
| uint8_t acc_msb = Wire.read(); | |
| uint8_t acc_lsb = Wire.read(); | |
| noInterrupts(); | |
| uint16_t time = micros() % 50000; | |
| uint8_t time_msb = time >> 8; | |
| uint8_t time_lsb = time; | |
| if(secondBuffer == false) { | |
| if(counter1 == bufferLength) { | |
| fucks += 1; | |
| } else { | |
| buf1[counter1] = acc_msb; | |
| buf1[counter1 + 1] = acc_lsb; | |
| buf1[counter1 + 2] = time_msb; | |
| buf1[counter1 + 3] = time_lsb; | |
| counter1 += 4; | |
| if(counter1 == bufferLength) { | |
| secondBuffer = true; | |
| } | |
| } | |
| } else { | |
| if(counter2 == bufferLength) { | |
| fucks += 1; | |
| } else { | |
| buf2[counter2] = acc_msb; | |
| buf2[counter2 + 1] = acc_lsb; | |
| buf2[counter2 + 2] = time_msb; | |
| buf2[counter2 + 3] = time_lsb; | |
| counter2 += 4; | |
| if(counter2 == bufferLength) { | |
| secondBuffer = false; | |
| } | |
| } | |
| } | |
| } |
Hi,
That's ancient history... but I believe it was Arduino Nano or Arduino Mini. The MPU-6050 was connected via I2C to the Arduino's I2C pins (don't know the pin numbers, but you should be able to find them in your Arduino's datasheet).
And the SD card was connected via SPI, I guess going with a tutorial like this one https://create.arduino.cc/projecthub/electropeak/sd-card-module-with-arduino-how-to-read-write-data-37f390 should help. But beware, the tiny and frequent writes will kill off an SD card in minutes of operation.
Thank you for your answare!
I will try to buy the MPU-6050 + Arduino MKR1010 + SD card + battery of 3.3V.
I want start/stop the acquisition of the acceleration with remote command (the signal will be write on SD card) and after the "stop command" send the signal trought BLT and show the graph of acceleration;
( I've already make a similar system with different accelerometer but the simple time is not correct and the final graph appear not accurate)
Do you see critical point or issue about the project?
If I have some problems can I ask you some helps/tips ?
Yeah, I guess that can be done fairly easily. I just have bad experience with the SD cards, as they're made for a finite amount of writes, not really accounting the size of the write (ie. a 1kB update "hurts" as much as a 1MB update), so I try to avoid them if possible. If you'll be using MKR1010, you might be better off just streaming the data away on Bluetooth/WiFi.
That's what I did when I needed to stream high-frequency accelerometer data from a remote mount - we were measuring the smoothness of a highway, the accelerometers were mounted on the car's undercarriage and were battery operated. They streamed the data into the car via NRF24L01, which was read via another arduino and serial console into a notebook.
But my experiences are years old, maybe with MKR1010's larger memory, you will be able to better optimize the writing to SD card and you'll be able to save power by not having to have the radios constantly on. Good luck with the project, you'll learn a ton :-)
Hi Veproza! Thank you for your help in the last post!
Now I am trying your code with arduino Nano + MPU_6050 connected via I2C.
I want print the value of acceleration on "Serial Monitor" but something goes wrong like you can see in the picture:
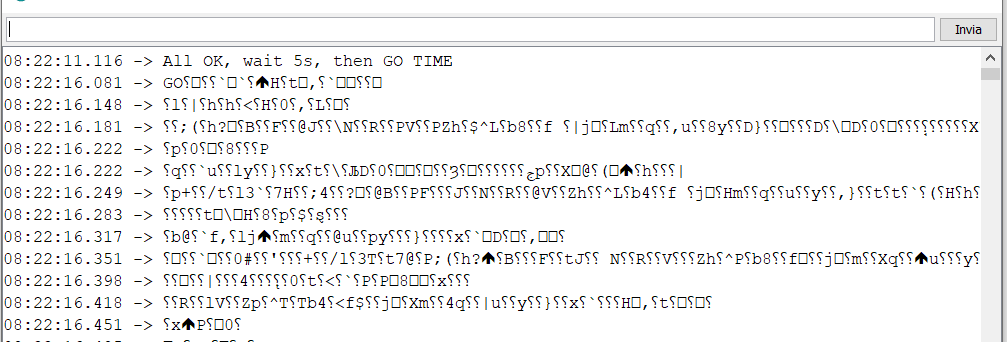
I have change your code just a little deleting all the line about the SD card function and adding the line below to print the value :
(the bundle rate is correctly setted)
String myString = (char*)toSend; Serial.println(myString);
Can you help me ?
Thanks
Below the complete code:
_// Based on MPU-6050 Short Example Sketch
// By Arduino User JohnChi
// August 17, 2014
// Public Domain
#include <Wire.h>
#include <TimerOne.h>
#include <SD.h>
#include <SPI.h>
#define bufferLength 128
const int MPU=0x68; // I2C address of the MPU-6050
int second = floor(millis() / 1000);
File myFile;
volatile byte buf1[bufferLength];
volatile byte buf2[bufferLength];
byte toSend[bufferLength];
volatile uint8_t counter1;
volatile uint8_t counter2;
volatile bool secondBuffer = false;
void setup(){
Wire.begin();
Wire.beginTransmission(MPU);
Wire.write(0x6B); // PWR_MGMT_1 register
Wire.write(0); // set to zero (wakes up the MPU-6050)
Wire.endTransmission(true);
Serial.begin(115200);
while (!Serial) {}
pinMode(10, OUTPUT);
// if (!SD.begin(10)) {
// Serial.println("initialization failed!");
// return;
// }
//myFile = SD.open("test.txt", FILE_WRITE);
Serial.println("All OK, wait 5s, then GO TIME");
delay(5000);
Serial.print("GO");
Timer1.initialize(1000);
Timer1.attachInterrupt(readData);
}
bool dead = false;
volatile uint8_t fucks = 0;
void loop() {
second = floor(millis() / 1000);
if(dead) {
return;
}
if(second > 60 || fucks > 5) {
if(!dead) {
Serial.println("END");
Serial.println(fucks);
myFile.close();
Serial.println("Closed");
dead = true;
}
return;
}
if(counter1 >= bufferLength or counter2 >= bufferLength) {
noInterrupts();
if(counter1 >= bufferLength) {
memcpy((char*)toSend, (char*)buf1, bufferLength);
counter1 = 0;
} else {
memcpy((char*)toSend, (char*)buf2, bufferLength);
counter2 = 0;
}
interrupts();
// myFile.write(toSend,bufferLength);
// String myString = String(toSend);
String myString = (char*)toSend;
Serial.println(myString);
}
}
void readData(){
interrupts();
Wire.beginTransmission(MPU);
Wire.write(0x3B); // starting with register 0x3B (ACCEL_XOUT_H)
Wire.endTransmission(false);
Wire.requestFrom(MPU,2,true);
uint8_t acc_msb = Wire.read();
uint8_t acc_lsb = Wire.read();
noInterrupts();
uint16_t time = micros() % 50000;
uint8_t time_msb = time >> 8;
uint8_t time_lsb = time;
if(secondBuffer == false) {
if(counter1 == bufferLength) {
fucks += 1;
} else {
buf1[counter1] = acc_msb;
buf1[counter1 + 1] = acc_lsb;
buf1[counter1 + 2] = time_msb;
buf1[counter1 + 3] = time_lsb;
counter1 += 4;
if(counter1 == bufferLength) {
secondBuffer = true;
}
}
} else {
if(counter2 == bufferLength) {
fucks += 1;
} else {
buf2[counter2] = acc_msb;
buf2[counter2 + 1] = acc_lsb;
buf2[counter2 + 2] = time_msb;
buf2[counter2 + 3] = time_lsb;
counter2 += 4;
if(counter2 == bufferLength) {
secondBuffer = false;
}
}
}
}_
Hi,
so, here's the thing: this code is not particularly great for learning. It's a part of my thesis and the reasoning for what's happening inside is in that thesis, not in the code in form of comments (or at least a properly written clean code).
Anyway, the trouble is that what you're outputting to Serial is what I was writing to SD card. And to save on memory and bandwidth, I saved all the data in binary. That means that for an integer value of 60, I would write 0x3C to the SD card. However, the serial console tries to parse that as an ASCII text, outputting "<" (see ASCII table).
If you want to convert integer 60 to string "60", you'd need to call the function String with the integer as first parameter and "DEC" as second. Or pass in "DEC" as the second parameter of Serial.write, as it works much like the String function.
To further complicate matters, I stored the values in RAM buffers, so that I could write to SD cards in batches (to save on the write count and therefore the speed of SD card degradation). And also my code adds a timestamp to each datapoint so the data could be reconstructed.
Personally, for debugging, I'd rather rewrite the data collection part of the code
void readData(){
// interrupts(); not necessary
Wire.beginTransmission(MPU);
Wire.write(0x3B); // starting with register 0x3B (ACCEL_XOUT_H)
Wire.endTransmission(false);
Wire.requestFrom(MPU,2,true);
uint8_t acc_msb = Wire.read();
uint8_t acc_lsb = Wire.read();
// debugging output
int16_t acc = acc_msb << 8 | acc_lsb;
Serial.write(acc, DEC)
// rest of the function can be deleted
}Note that I have not tested this code as I don't have the arduino on hand atm, but it should work in principle.
Most importantly though, start with something designed for learning. I myself started from this MPU tutorial on Arduino's pages, I'd recommend you do the same. Good luck! :-)
Hi,
can you share the model/version of Arduino and the wiring that you had use for for your project?
Thank you!