Created
January 14, 2015 18:31
-
-
Save yoneken/49e779b6ad26216f72ac to your computer and use it in GitHub Desktop.
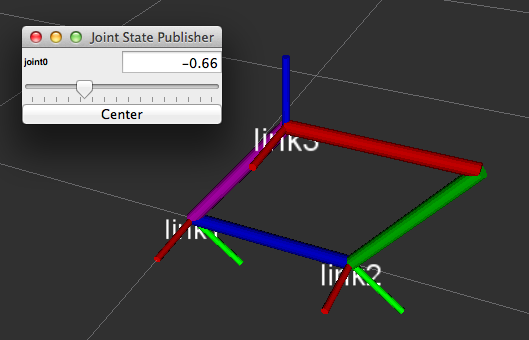
This file is a urdf which mimics a parallel linkage.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| <?xml version="1.0"?> | |
| <robot name="parallel_link"> | |
| <link name="base_link"> | |
| <visual> | |
| <origin xyz="0 0.25 0" rpy="1.57 0 0" /> | |
| <geometry> | |
| <cylinder radius="0.02" length="0.5" /> | |
| </geometry> | |
| <material name="blue"> | |
| <color rgba="0 0 .8 1" /> | |
| </material> | |
| </visual> | |
| </link> | |
| <joint name="joint0" type="revolute"> | |
| <parent link="base_link"/> | |
| <child link="link1"/> | |
| <origin xyz="0 0 0" rpy="0 0 0" /> | |
| <axis xyz="1 0 0" /> | |
| <limit lower="-1.57" upper="1.57" effort="0.5293" velocity="6.159937255" /> | |
| </joint> | |
| <link name="link1"> | |
| <visual> | |
| <origin xyz="0 0 0.25" rpy="0 0 0" /> | |
| <geometry> | |
| <cylinder radius="0.02" length="0.5" /> | |
| </geometry> | |
| <material name="yellow"> | |
| <color rgba=".8 0 .8 1" /> | |
| </material> | |
| </visual> | |
| </link> | |
| <joint name="joint1" type="revolute"> | |
| <parent link="base_link"/> | |
| <child link="link2"/> | |
| <origin xyz="0 0.5 0" rpy="0 0 0" /> | |
| <axis xyz="1 0 0" /> | |
| <limit lower="-1.57" upper="1.57" effort="0.5293" velocity="6.159937255" /> | |
| <mimic joint="joint0" multiplier="1" offset="0" /> | |
| </joint> | |
| <link name="link2"> | |
| <visual> | |
| <origin xyz="0 0 0.25" rpy="0 0 0" /> | |
| <geometry> | |
| <cylinder radius="0.02" length="0.5" /> | |
| </geometry> | |
| <material name="green"> | |
| <color rgba="0 .8 0 1" /> | |
| </material> | |
| </visual> | |
| </link> | |
| <joint name="joint2" type="revolute"> | |
| <parent link="link1"/> | |
| <child link="link3"/> | |
| <origin xyz="0 0 0.5" rpy="0 0 0" /> | |
| <axis xyz="1 0 0" /> | |
| <limit lower="-1.57" upper="1.57" effort="0.5293" velocity="6.159937255" /> | |
| <mimic joint="joint0" multiplier="-1" offset="0" /> | |
| </joint> | |
| <link name="link3"> | |
| <visual> | |
| <origin xyz="0 0.25 0" rpy="1.57 0 0" /> | |
| <geometry> | |
| <cylinder radius="0.02" length="0.5" /> | |
| </geometry> | |
| <material name="red"> | |
| <color rgba=".8 0 0 1" /> | |
| </material> | |
| </visual> | |
| </link> | |
| </robot> |
Your example is not use in gazebo
if you want to to solve the issue that URDF not support Closed loop chains.
you can reffer to:https://github.com/wojiaojiao/pegasus_gazebo_plugins or http://wiki.ros.org/Angel_jj/closed_loop_plugin
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
roslaunch urdf_tutorial display.launch model:=mimic_parallel_link.urdf gui:=True