In this project, you'll write software that stitches multiple images of a scene together into a panorama automatically. A panorama is a composite image that has a wider field of view than a single image, and can combine images taken at different times for interesting effects.
Your image stitcher will, at a minimum, do the following:
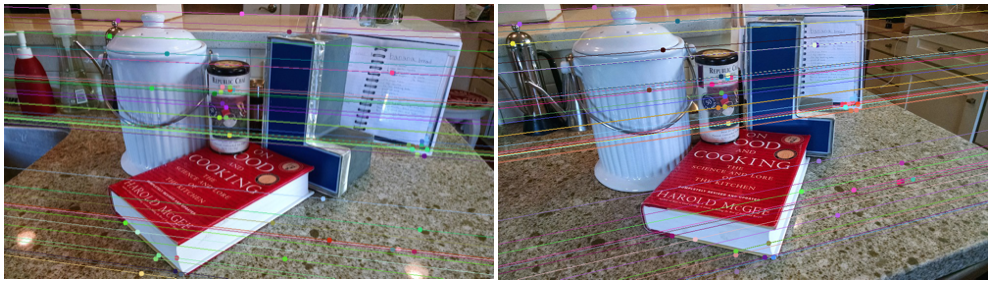
- locate corresponding points between a pair of images
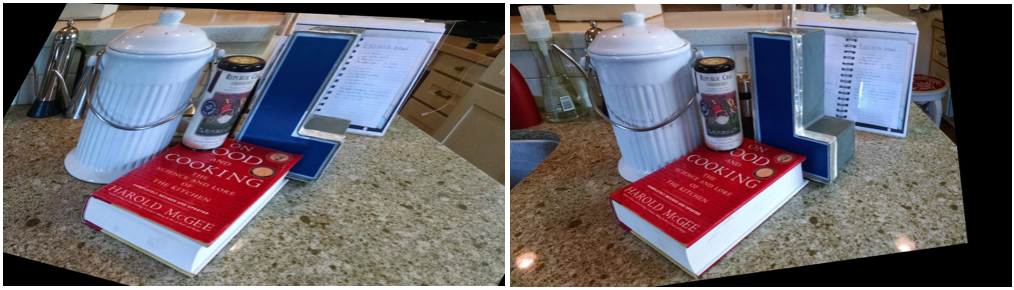
- use the corresponding points to fit a homography (2D projective transform) that maps one image into the space of the other
- use the homography to warp images into a common target frame, resizing and cropping as necessary
- composite several images in a common frame into a panorama
While I encourage you to make use of OpenCV's powerful libraries, for this project you must not use any of the functions in the stitcher package (although you're welcome to read its documentation and code for inspiration).
A homography is a 2D projective transformation, represented by a 3x3 matrix, that maps points in one image frame to another, assuming both images are captured with an ideal pinhole camera.
To establish a homography between two images, you'll first need to find a set of correspondences between them. One common way of doing this is to identify "interest points" or "key points" in both images, summarize their appearances using descriptors, and then establish matches between these "features" (interest points combined with their descriptors) by choosing features with similar descriptors from each image.
You're welcome to establish correspondences any way you like. I would recommend you consider extracting keypoints and descriptors using the cv2.SIFT interface to compute interest points and descriptors, and using one of the descriptor matchers OpenCV provides under a common interface.
You'll probably find it useful to visualize the matched features between two images to see how many of them look correct. It's a good bet that you'll have some incorrect matches, or "outliers". You can experiment with different feature extraction and matching techniques to try to reduce the number of outliers. The fewer there are, the better the fit of your homography will be, although you'll never be able to eliminate all of them.
Once you've established correspondences between two images, you'll use them to find a "best" homography mapping one image into the frame of another. Again, you're welcome to do this any way you like, but I suggest you consider looking at cv2.findHomography, which can compute the least-squares-best-fit homography given a set of corresponding points. It also offers robustified computation using RANSAC or the Least-Median methods. You'll likely need to tweak the robustifiers' parameters to get the best results.
The unit tests include test_homography, which will evaluate the difference between your computed homography and a "ground truth" known homography. If your homography is close enough to ground truth for this test to pass, you'll receive full credit. You'll lose points as the accuracy of your homography declines.
I will evaluate your homography computation with a broad selection of input images and ground-truth homographies, and measure the distribution of error norms. The most accurate implementation in class will recieve 20 bonus points. The second most accurate will receive 16, the third 12, the fourth 8, and the fifth 4.
I expect you'll need to delve into the details of feature matching and robust fitting to achieve the highest possible accuracy.
Once you've found homographies mapping all images into a common frame, you'll need to actually warp them according to these homographys before you can composite them together. This process is also referred to as "image rectification." A good place to start is [cv.warpPerspective](http://docs.opencv.org/modules/imgproc/doc/geometric_transformations.html#void warpPerspective(InputArray src, OutputArray dst, InputArray M, Size dsize, int flags, int borderMode, const Scalar& borderValue)), but be aware that out-of-the-box, it may map images outside the target image coordinates.
In addition to warping the image, you should add an alpha channel so that pixels not covered by the warped input image are "clear" before compositing. For a full specification of the expected behavior, see the function comment for warp_image() and its corresponding unit tests.
Composite your images together into a mosaic to form the final output panorama. You don't need to blend the images together (although you can for extra credit; see below), but there should be no occlusion of one image by another except where at least one image has valid warped pixels.
Capture at least one set of three or more images using any camera you like (your phone's camera will probably do fine) and stitch the images together into a panorama with your implementation. Add the source images, the panorama, and a script that can regenerate the pano from your implementation into the my_panos folder. Include a write_up.txt or write_up.pdf describing how to run your script, and any interesting information about your solution you'd like to share.
If you want, play around! Try taking a panorama where the same person or object appears multiple times. Try distant and close up scenes to see the effects of parallax on your solution. Place any interesting panos in the my_panos folder and I'll share the results with the class.
There's a lot more to explore in the world of homographies and panorama stitching. Implement as many of the below as you like for extra credit. Be sure to include code for the extra credit as part of your check-in. Also, please add a PDF write-up describing which extra credit you implemented called extra_credit.pdf in the project_1 directory so we can see your results.
Instead of taking all of your panoramas from the same spot, create a panorama by moving linearly along in front of a planar scene. Report your results and the challenges of taking such a pano.
Identify a known planar surface in an image and composite a planar image onto it. You can use this technique to add graffiti or a picture of your self to an image of a building.
Implement some form of alpha blending between overlapping images. Some possibilities include feathering, pyramid blending, or multi-band blending. The more sophisticated and higher-quality blending you use, the more points you'll earn.

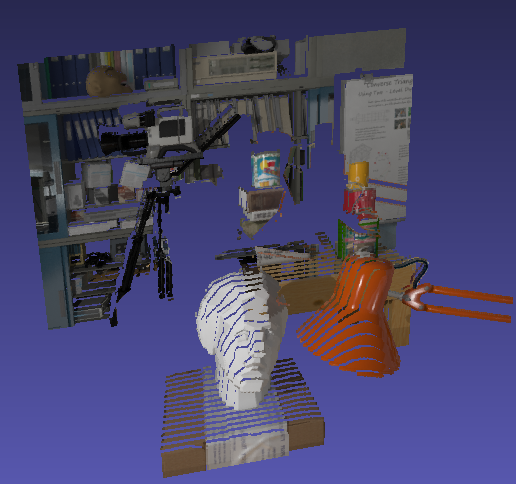
Instead of mapping all of your images into a single perspective frame, map them into spherical coordinates (this will require a guess of the focal length of the camera). This will allow you to create any spherical projection of your panorama, like the lovely "little planet":

Or the equirectangular projection:
Such panos will look better if they cover as much of the sphere as possible.
You will work on this project in randomly assigned groups of three. All group members should have identical submissions in each of their private repositories by the project due date. We will select one group member's repository, clone it, and use it to compute the grade for all group members.
If the group chooses to turn in a project N days late, each individual in the group will lose N of their remaining late days for the semester. If one or more students have no more late days left, they'll lose credit without affecting the other group members' grades.