- BeagleBone Blue
- 3D printed BeagleBone Blue case
- Martian II 220mm frame
- Racerstar RS20Ax4-V2 Quad electronic speed control
- Racerstar motors
- Props
- 2S LiPo battery
- XT60 socket
- DSM transmitter
- DSM satellite receiver
- 4-wire JST-SH cable
- velcro
- wires, solder and soldering iron
- heat-shrink tubing and hot air gun
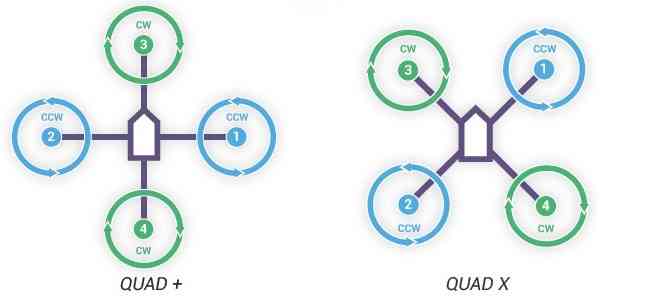
The motors should be configured as "Quad X" where BeagleBone Blue's USB connector is forward-facing.
- yellow
- orange
- green/black
- blue
- Started with https://beagleboard.org/p/jkridner/beaglebone-blue-220mm-quadcopter-9801d8. Will eventually add more.
@jadonk
Okay. I think I got it now. "I should have not added two new leads to my ESCs to attach them to my BBBlue." I can use the servo connectors to add the ESCs directly to the BBBlue by way of the Servo Rail. I just need to power the Servo Rail at boot. Got it!
Seth
P.S. I will test this in a few days or so. Reporting back here should be exciting w/ my new knowledge on this idea: Motor -> ESC -> Servo connector -> BBBlue Servo Rail!