- BeagleBone Blue
- 3D printed BeagleBone Blue case
- Martian II 220mm frame
- Racerstar RS20Ax4-V2 Quad electronic speed control
- Racerstar motors
- Props
- 2S LiPo battery
- XT60 socket
- DSM transmitter
- DSM satellite receiver
- 4-wire JST-SH cable
- velcro
- wires, solder and soldering iron
- heat-shrink tubing and hot air gun
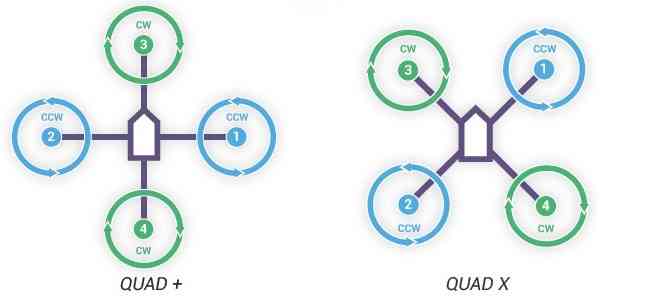
The motors should be configured as "Quad X" where BeagleBone Blue's USB connector is forward-facing.
- yellow
- orange
- green/black
- blue
- Started with https://beagleboard.org/p/jkridner/beaglebone-blue-220mm-quadcopter-9801d8. Will eventually add more.

Did you use the 2S LiPo battery to drive just the BB Blue (and have other batteries for the motors) or did you use just the one 2S LiPo battery to drive the entire quadcopter?
Followup question: Did you use the PDB that came with the frame or did you use the 4 DC motor drivers?